Fast Accelerometer-Based Motion Recognition with a Dual Buffer Framework
Hubert P. H. Shum, Taku Komura and Shu Takagi
International Journal of Virtual Reality (IJVR), 2011

Abstract
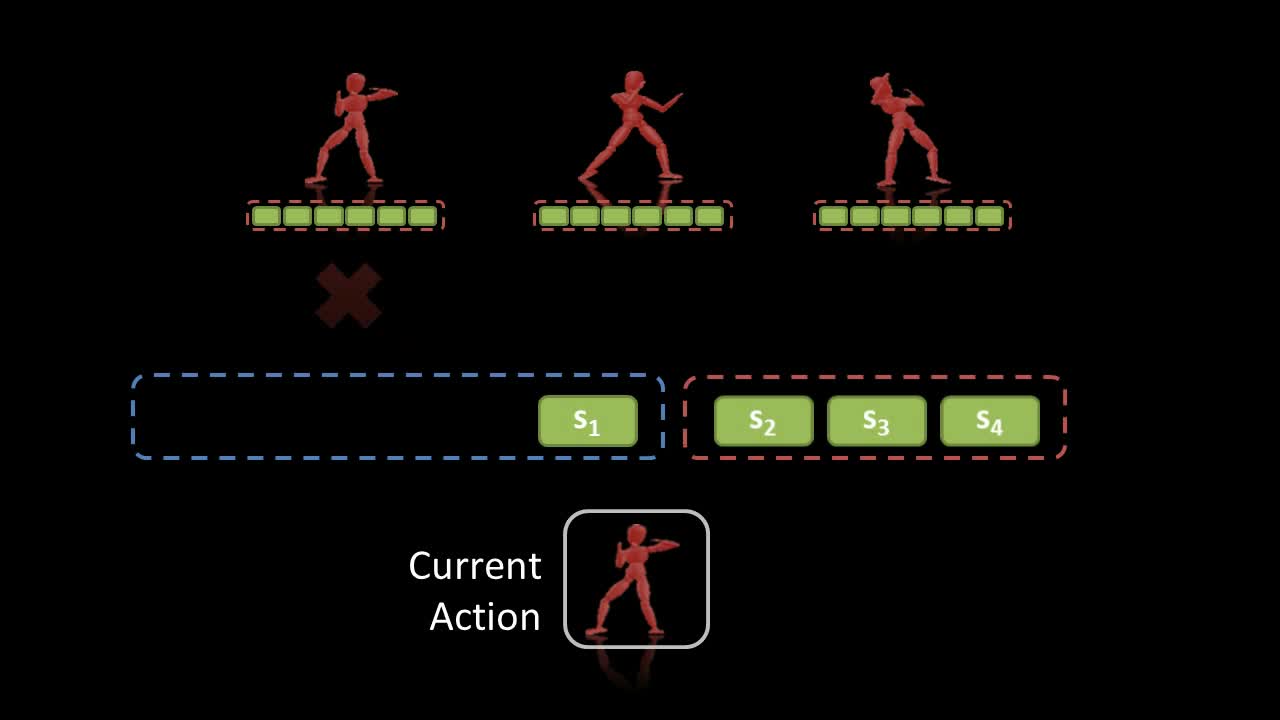
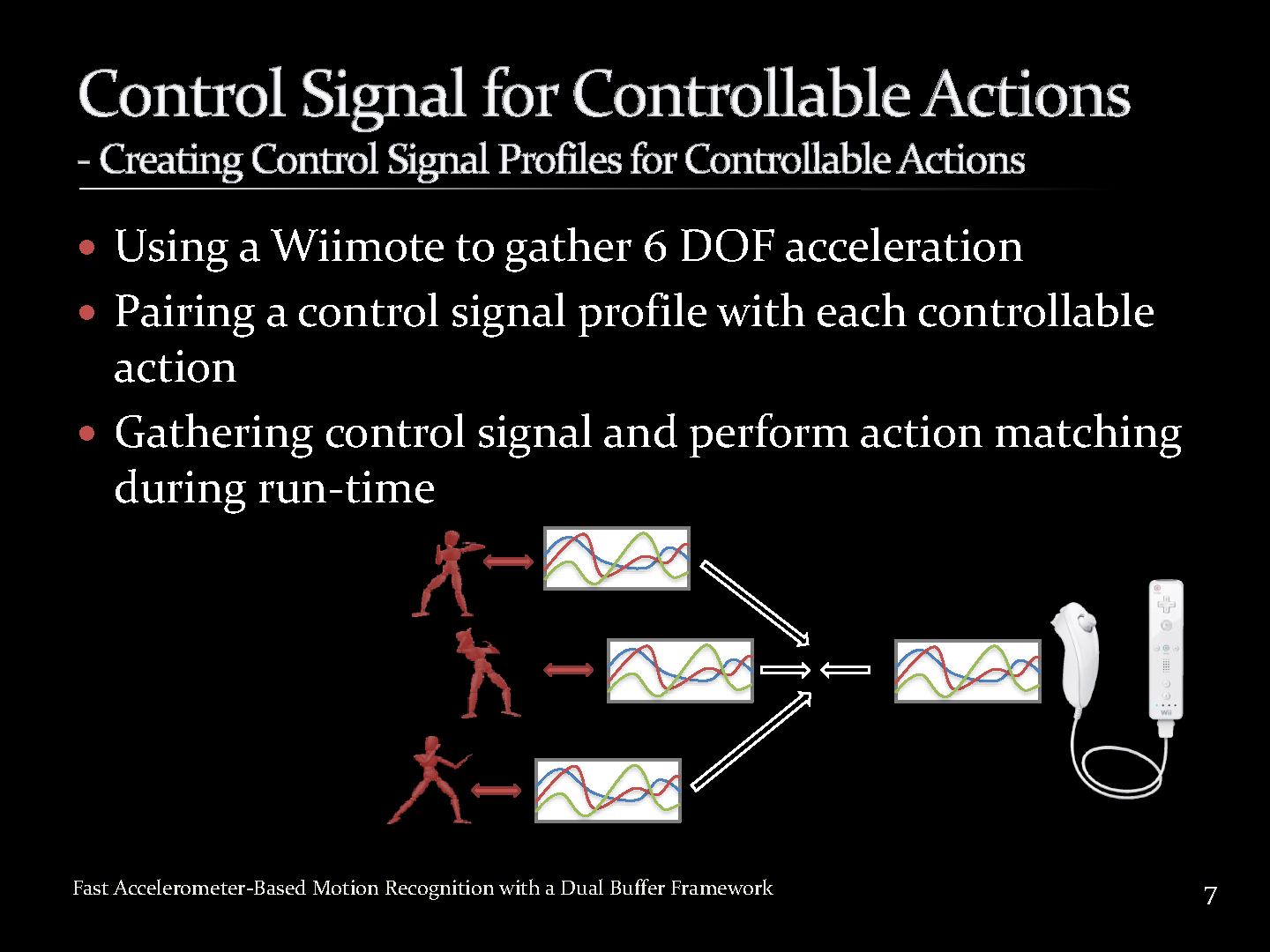
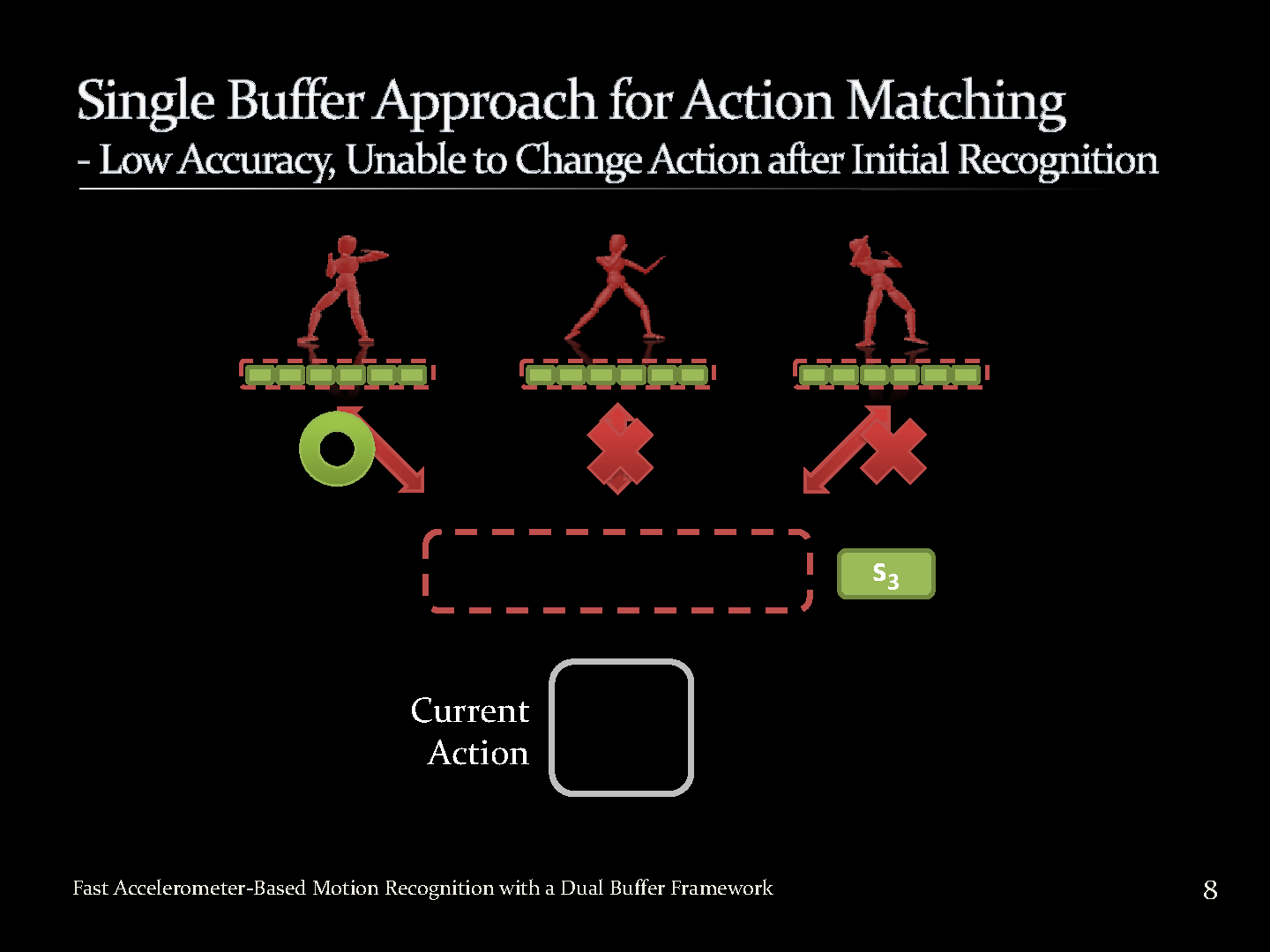
The low-cost gyro-accelerometer based controllers have opened up a potential of using 3D computer games for serious applications such as sports and vocational training. Previous games apply simple template matching for the motion recognition which suffers from poor accuracy and time lag. In order to cope with these problems, we propose a novel dual buffer approach that dramatically increases the recognition rate and shortens the time lag for motion recognition. The system first recognizes the user control signal with a small buffer to minimize the time lag. When more signals arrive from the sensor, an elaborate recognition is performed, and the previously recognized action is switched if necessary. Using boxing as an example, we show that we can control a virtual character to perform 13 different actions using a buffer size of one-tenth of a second. Since our system is computationally inexpensive, it can be used in game consoles. As it is accurate and responsive, it can also be applied for serious sport training.