Real-Time Physical Modelling of Character Movements with Microsoft Kinect
Hubert P. H. Shum and Edmond S. L. Ho
Proceedings of the 2012 ACM Symposium on Virtual Reality Software and Technology (VRST), 2012
Abstract
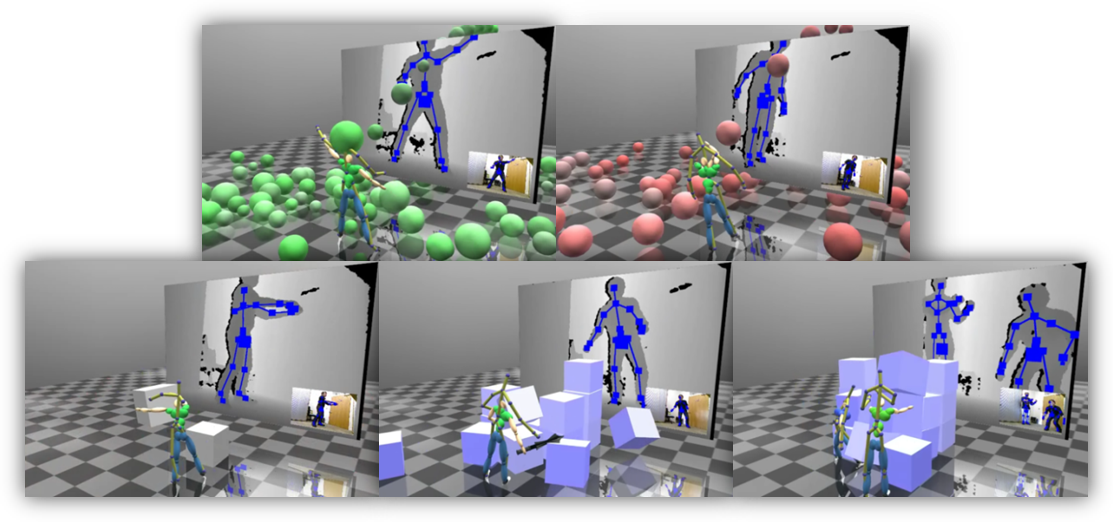
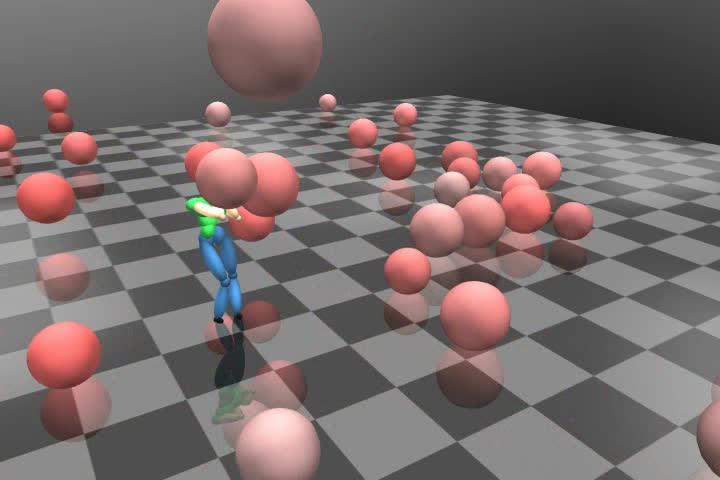
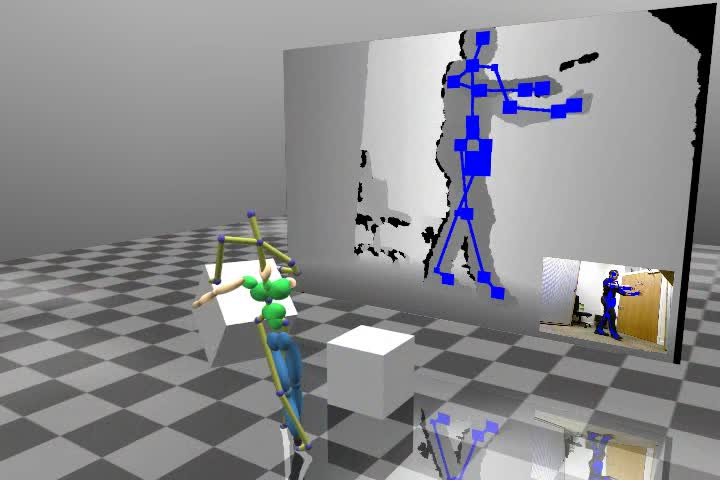
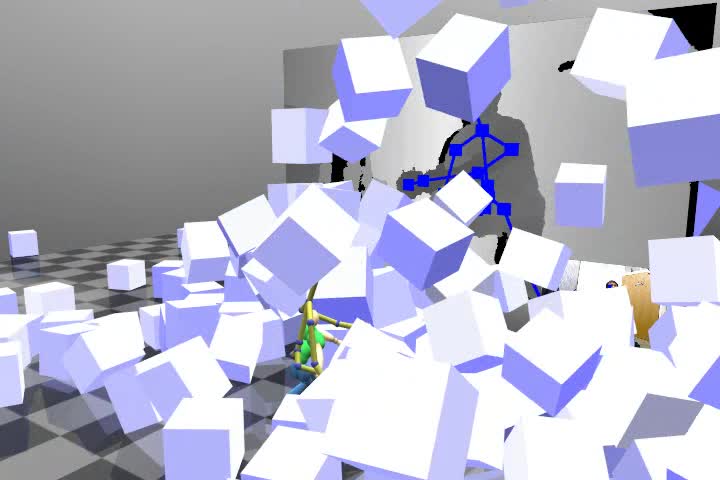
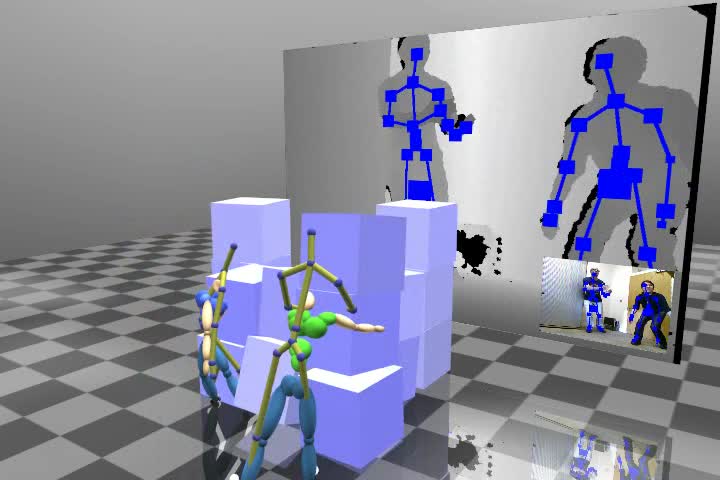
With the advancement of motion tracking hardware such as the Microsoft Kinect, synthesizing human-like characters with real-time captured movements becomes increasingly important. Traditional kinematics and dynamics approaches perform sub-optimally when the captured motion is noisy or even incomplete. In this paper, we proposed a unified framework to control physically simulated characters with live captured motion from Kinect. Our framework can synthesize any posture in a physical environment using external forces and torques computed by a PD controller. The major problem of Kinect is the incompleteness of the captured posture, with some degree of freedom (DOF) missing due to occlusions and noises. We propose to search for a best matched posture from a motion database constructed in a dimensionality reduced space, and substitute the missing DOF to the live captured data. Experimental results show that our method can synthesize realistic character movements from noisy captured motion. The proposed algorithm is computationally efficient and can be applied to a wide variety of interactive virtual reality applications such as motion-based gaming, rehabilitation and sport training.


YouTube
Cite This Research
Supporting Grants

Received from The University of Worcester, UK, 2012-2012
Project Page