Environment-Aware Real-Time Crowd Control
Joseph Henry, Hubert P. H. Shum and Taku Komura
Proceedings of the 2012 ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), 2012
Abstract
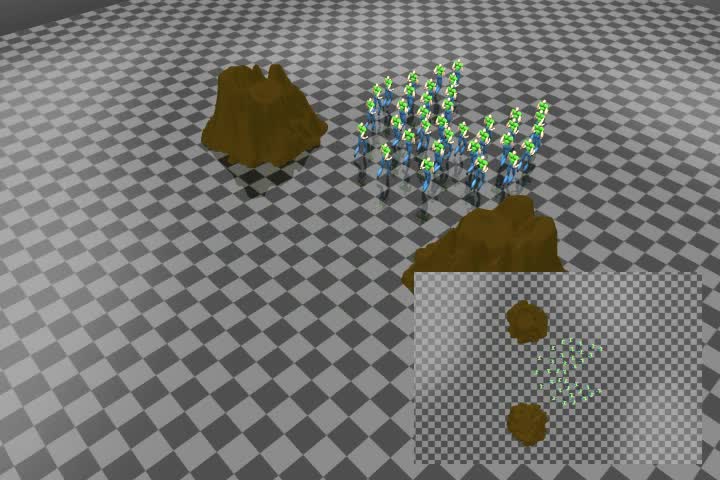
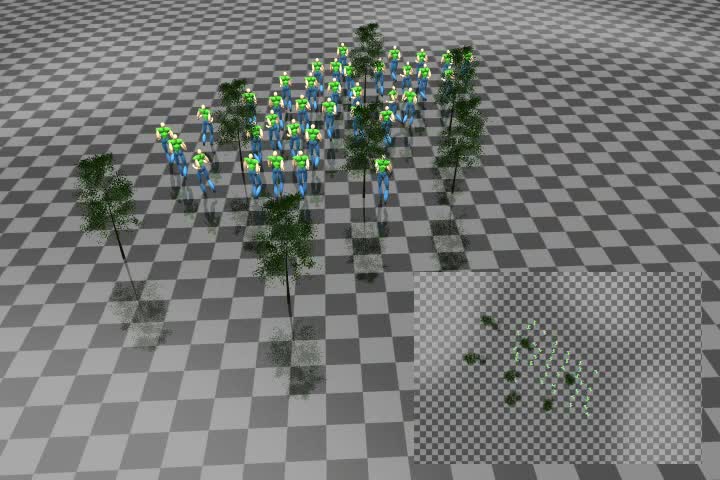
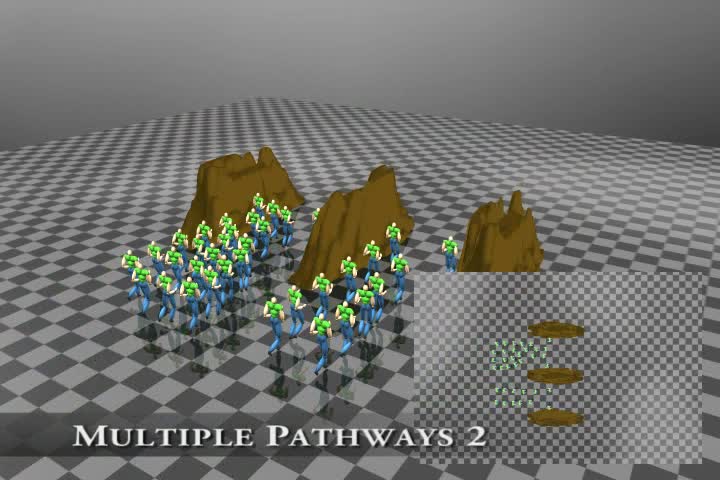
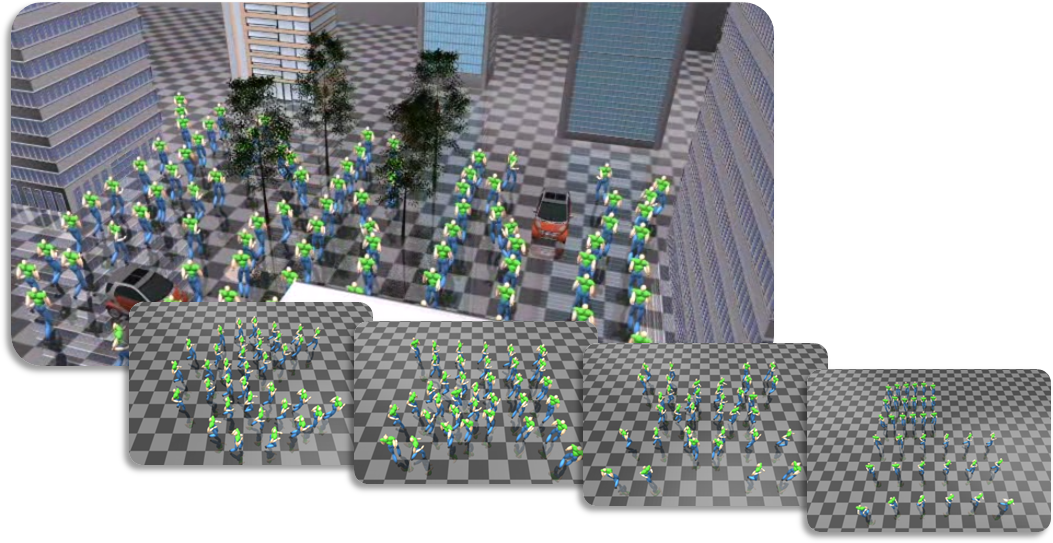
Real-time crowd control has become an important research topic due to the recent advancement in console game quality and hardware processing capability. The degrees of freedom of a crowd is much higher than that provided by a standard user input device. As a result most crowd control systems require the user to design the crowd movements through multiple passes, such as first specifying the crowd's start and goal points, then providing the agent trajectories with streamlines. Such a multi-pass control would spoil the responsiveness and excitement of real-time games. In this paper, we propose a new, single-pass algorithm to control crowds using a deformable mesh. When controlling crowds, we observe that most of the low level details are related to passive interactions between the crowd and the environment, such as obstacle avoidance and diverging/merging at cross points. Therefore, we simplify the crowd control problem by representing the crowd with a deformable mesh that passively reacts to the environment. As a result, the user can focus on high level control that is more important for context delivery. Our algorithm provides an efficient crowd control framework while maintaining the quality of the simulation, which is useful for real-time applications such as strategy games.