PyTorch-Based Implementation of Label-Aware Graph Representation for Multi-Class Trajectory Prediction
Qianhui Men and Hubert P. H. Shum
Software Impacts (SIMPAC), 2021
Impact Factor: 1.2† Citation: 11#
Abstract
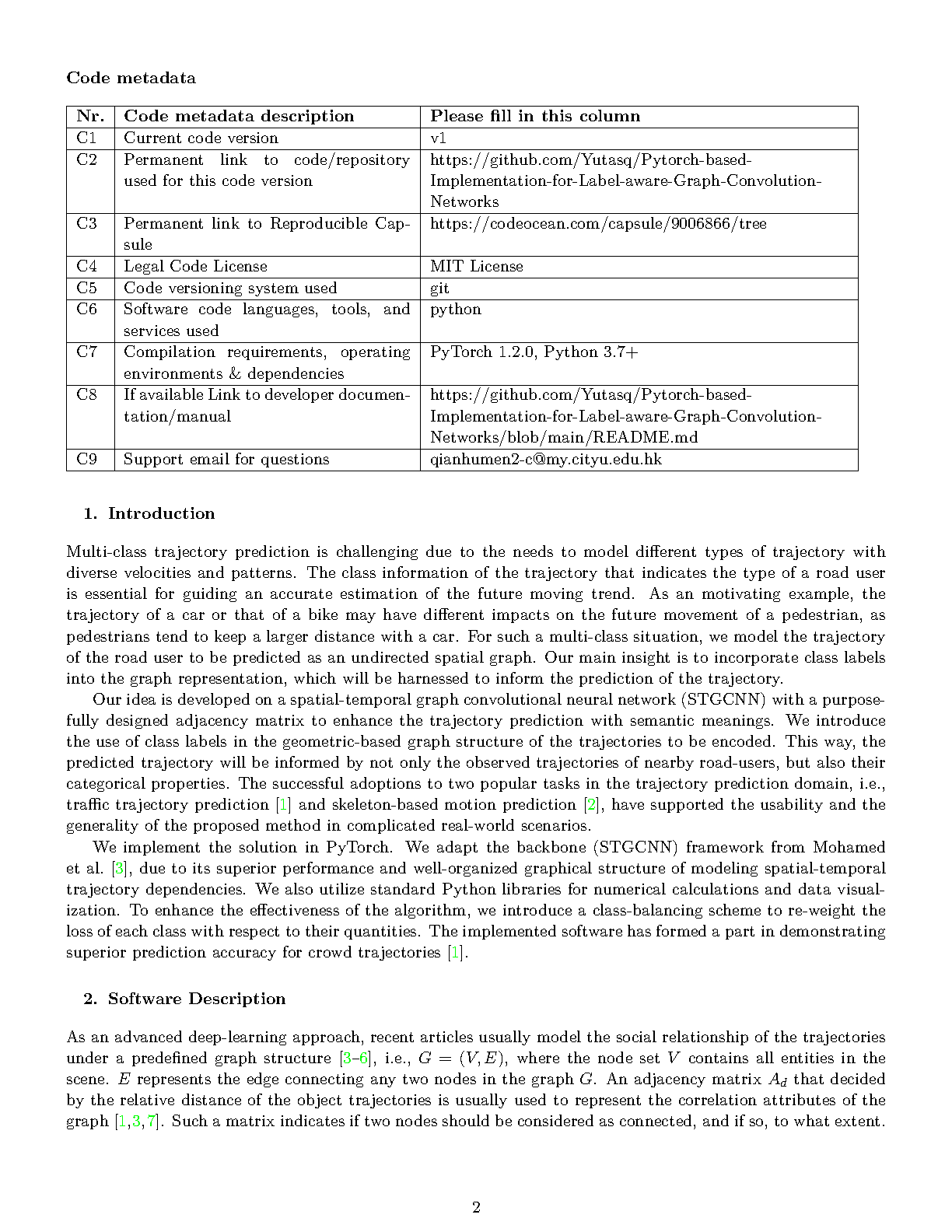
Trajectory Prediction under diverse patterns has attracted increasing attention in multiple real-world applications ranging from urban traffic analysis to human motion understanding, among which graph convolution network (GCN) is frequently adopted with its superior ability in modeling the complex trajectory interactions among multiple humans. In this work, we propose a python package by enhancing GCN with class label information of the trajectory, such that we can explicitly model not only human trajectories but also that of other road users such as vehicles. This is done by integrating a label-embedded graph with the existing graph structure in the standard graph convolution layer. The flexibility and the portability of the package also allow researchers to employ it under more general multi-class sequential prediction tasks.