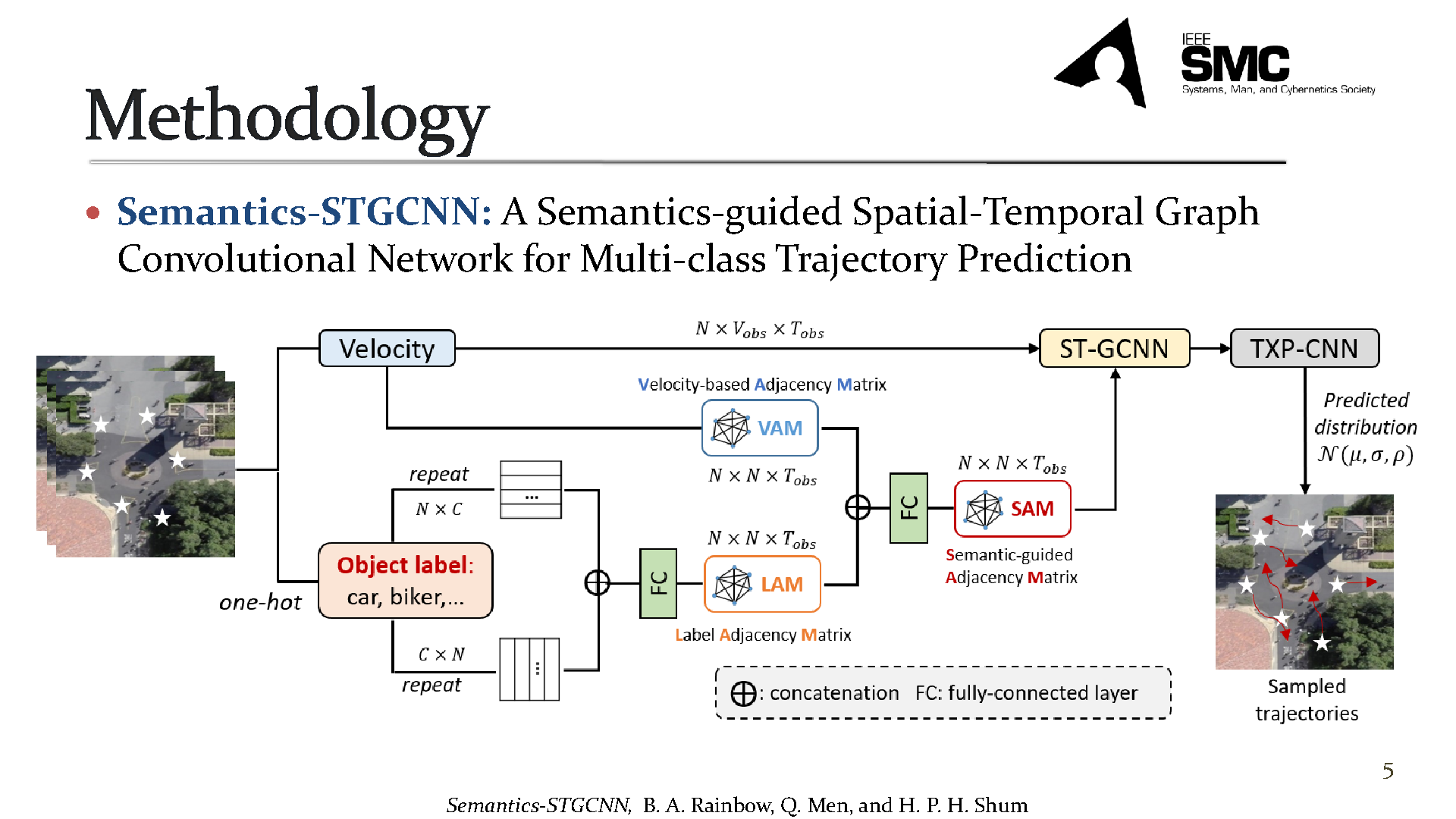
Semantics-STGCNN: A Semantics-Guided Spatial-Temporal Graph Convolutional Network for Multi-Class Trajectory Prediction
Ben Rainbow, Qianhui Men and Hubert P. H. Shum
Proceedings of the 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), 2021
Abstract
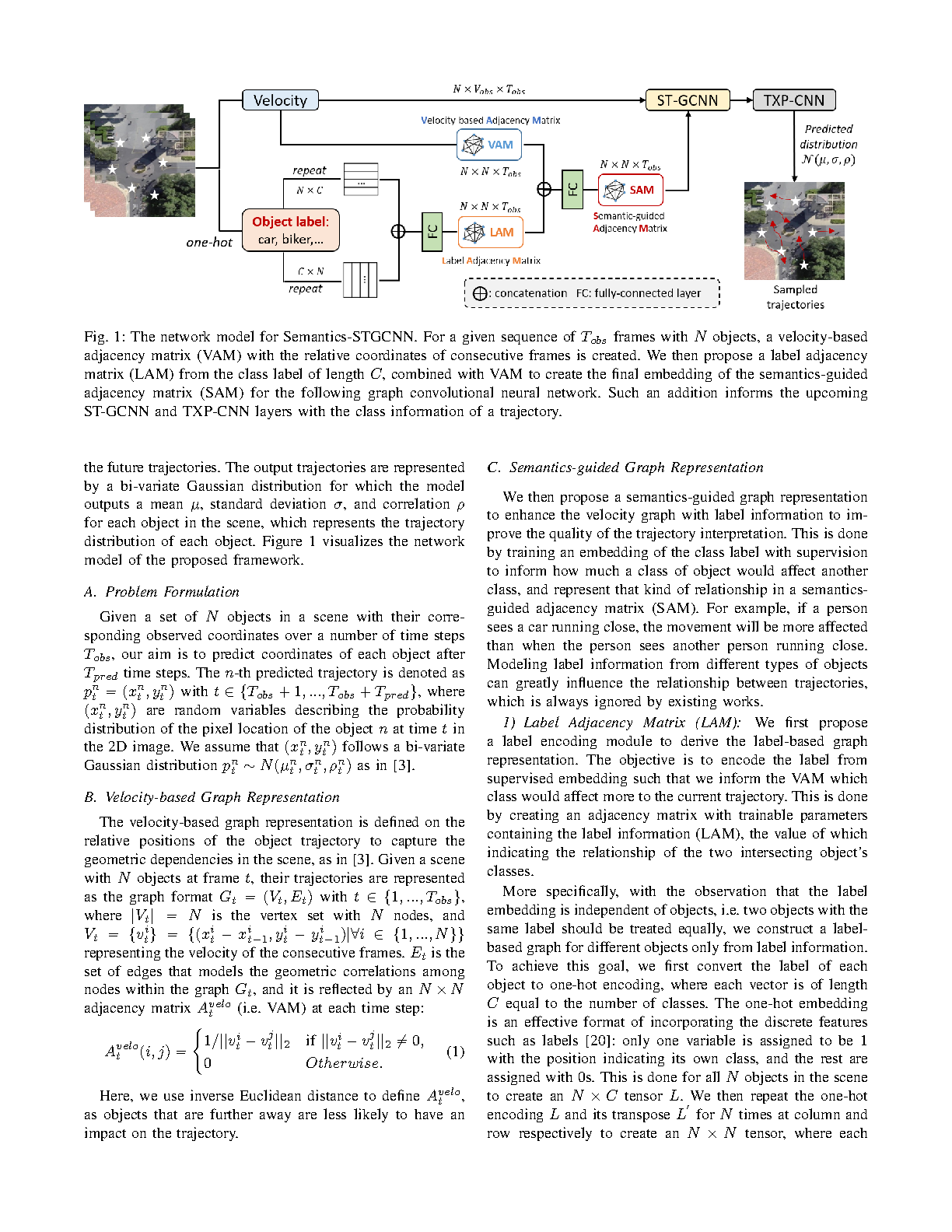
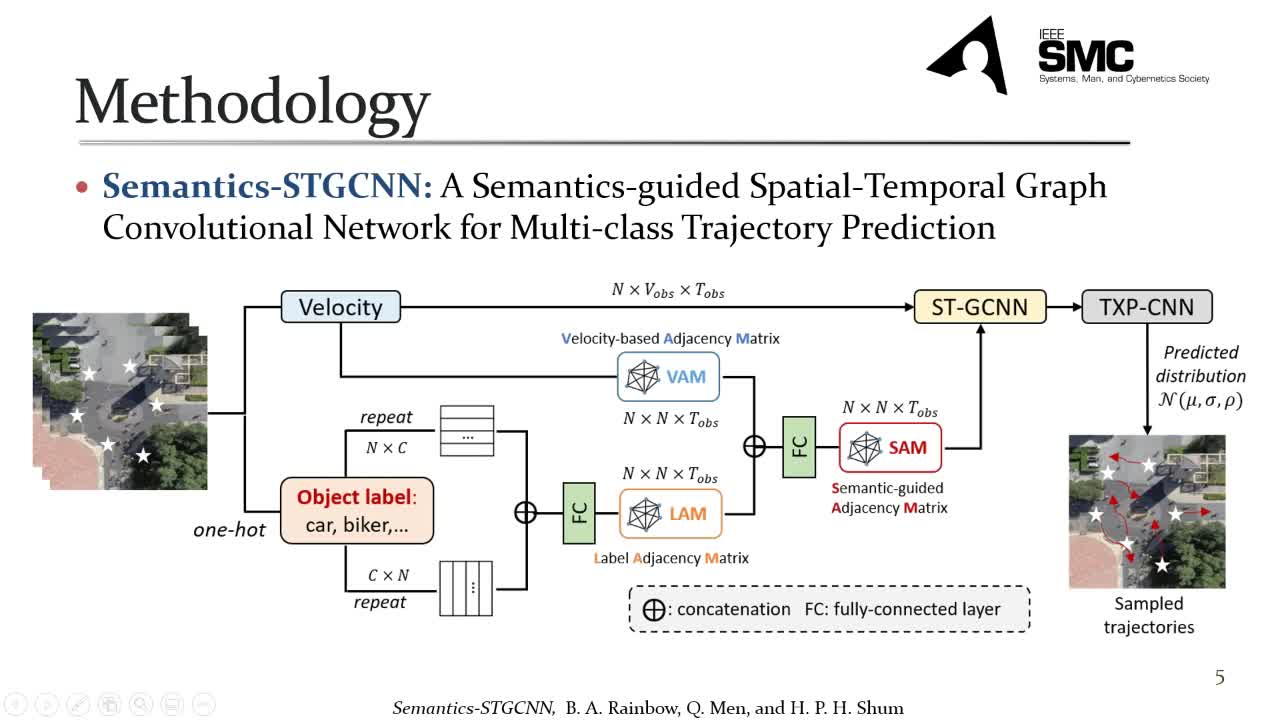
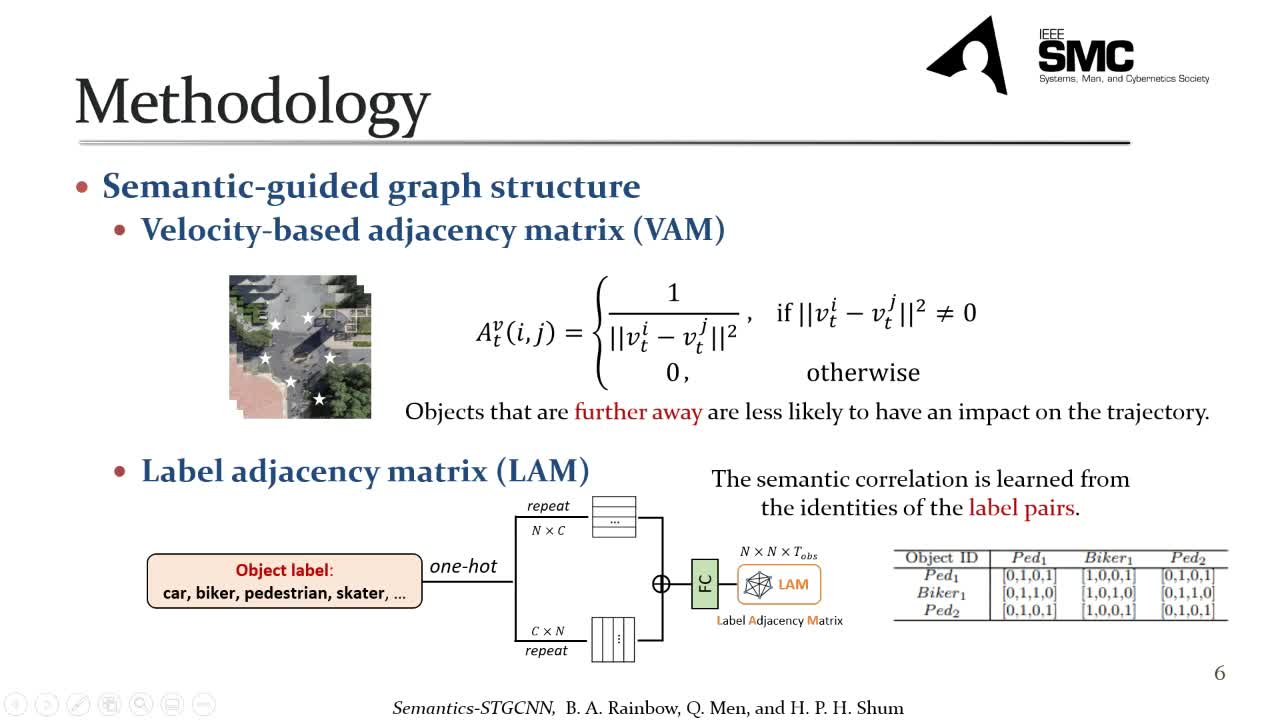
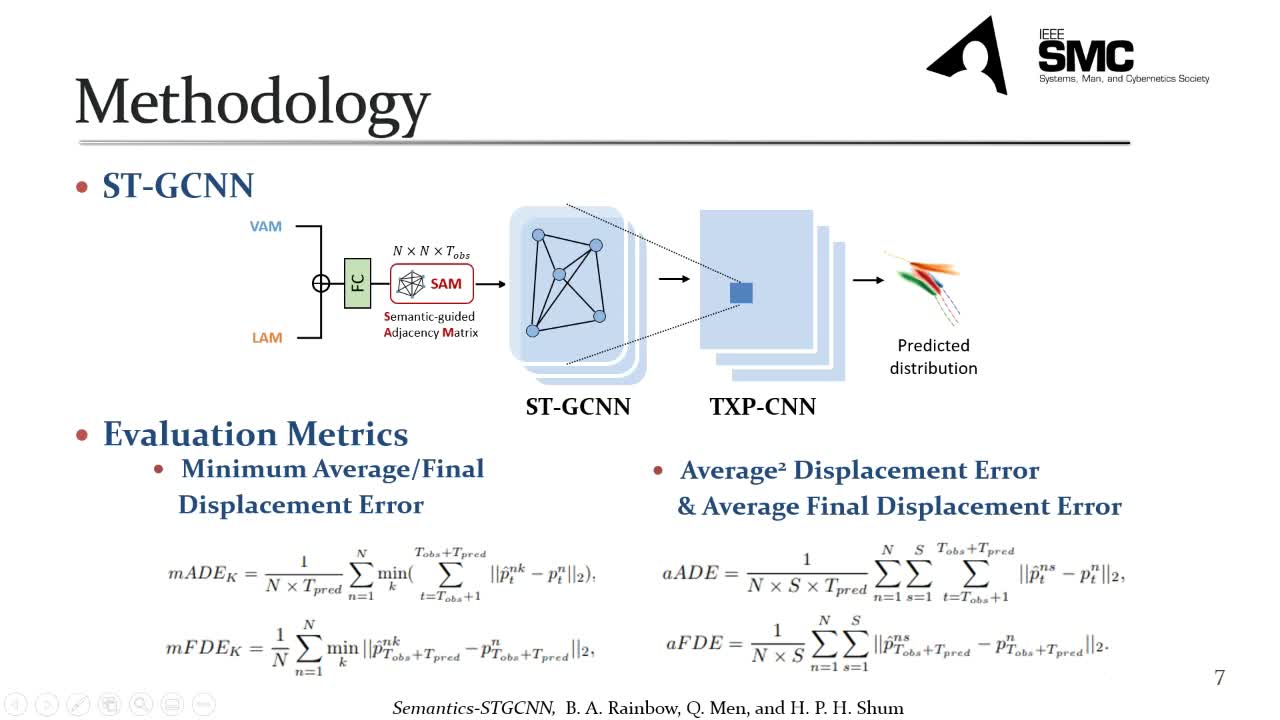
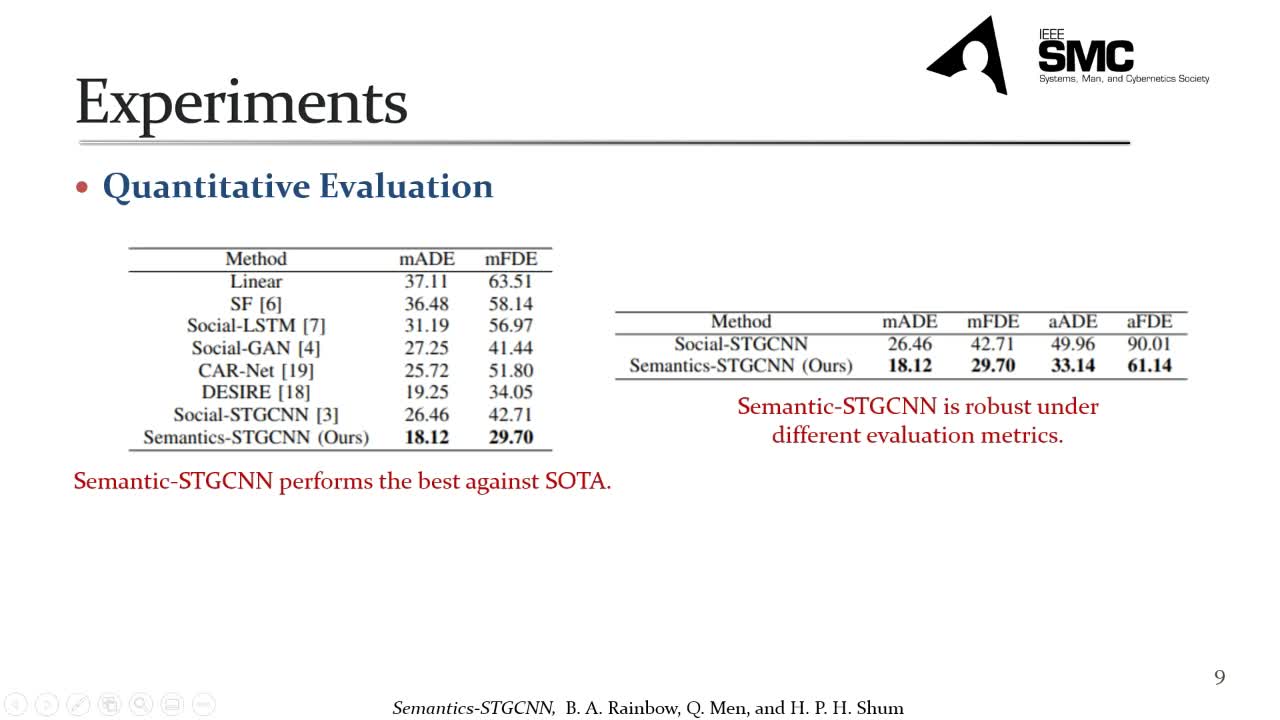
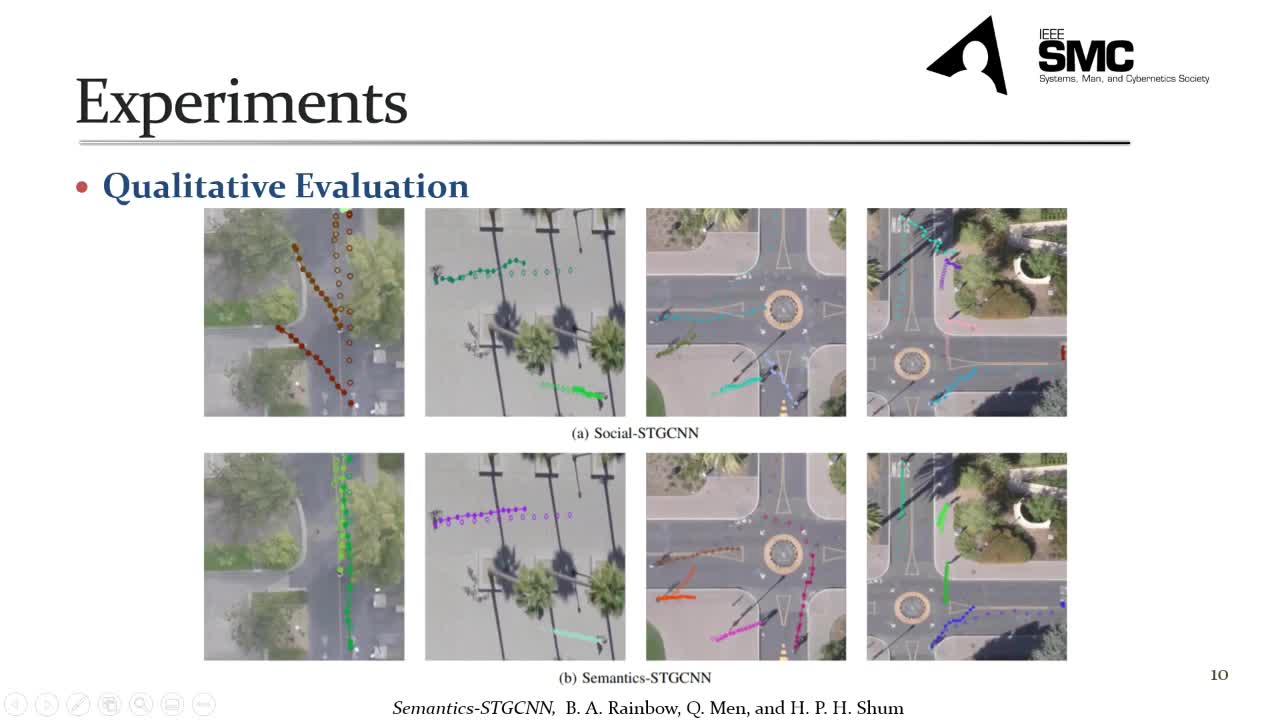
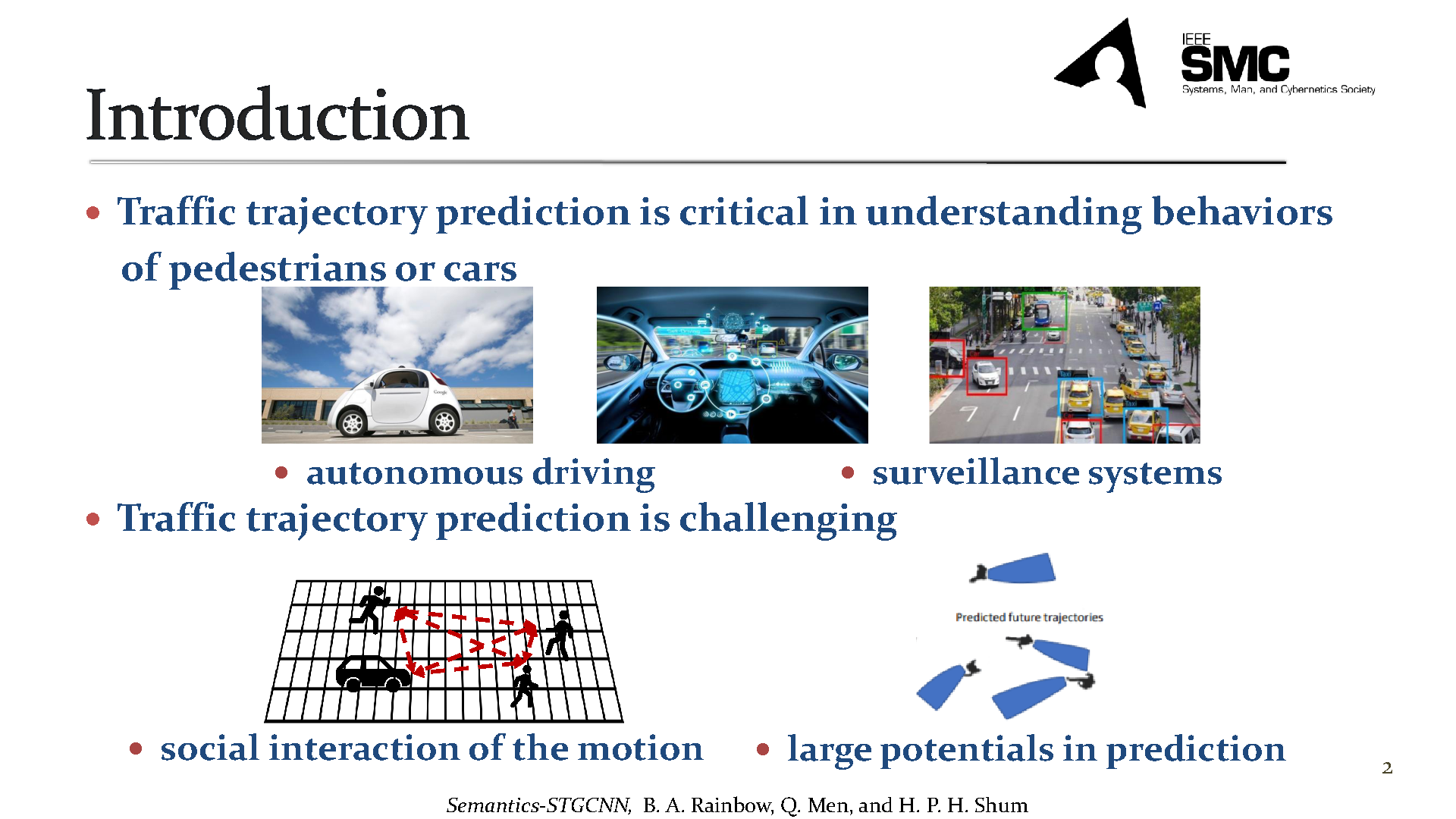
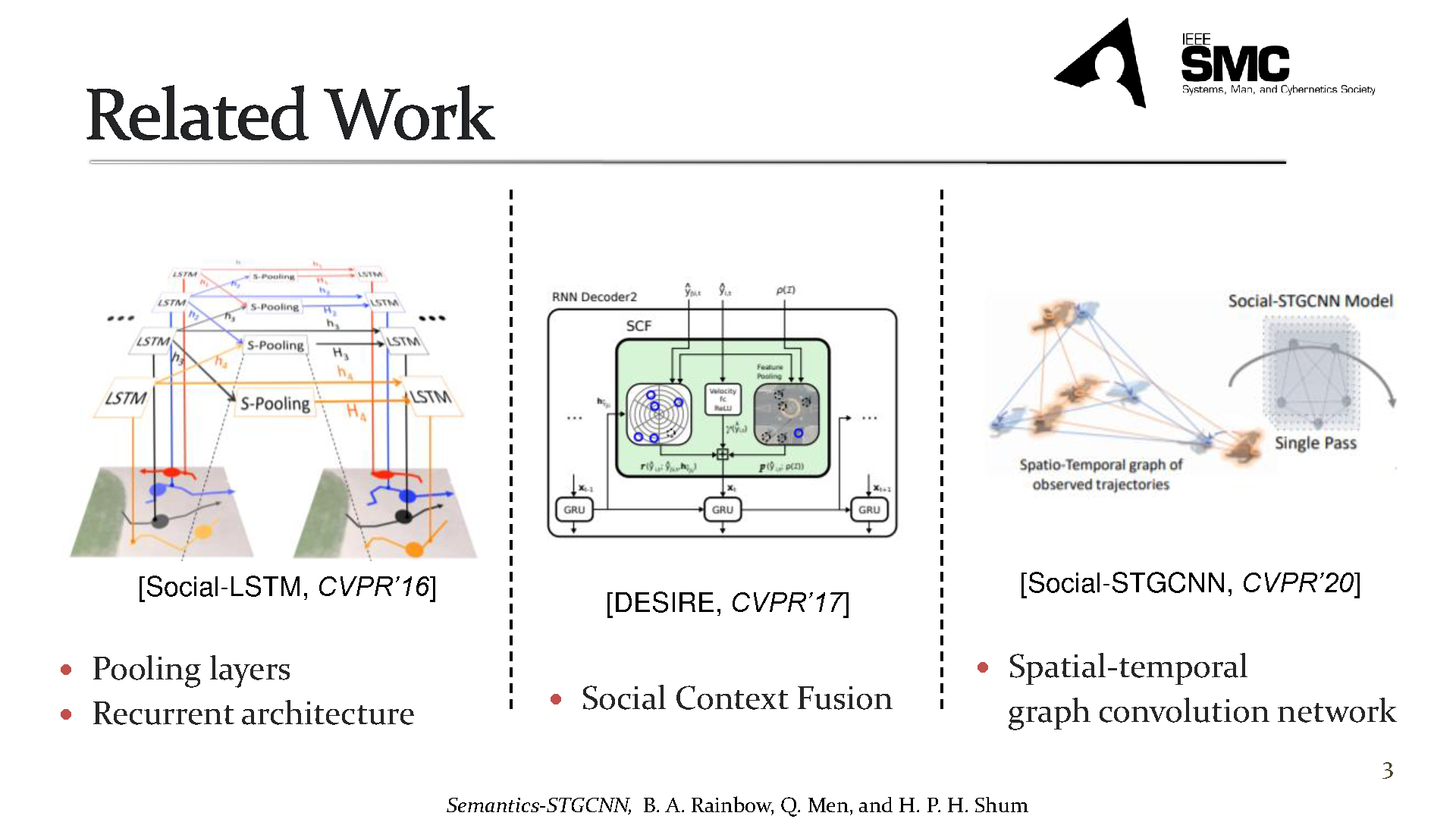
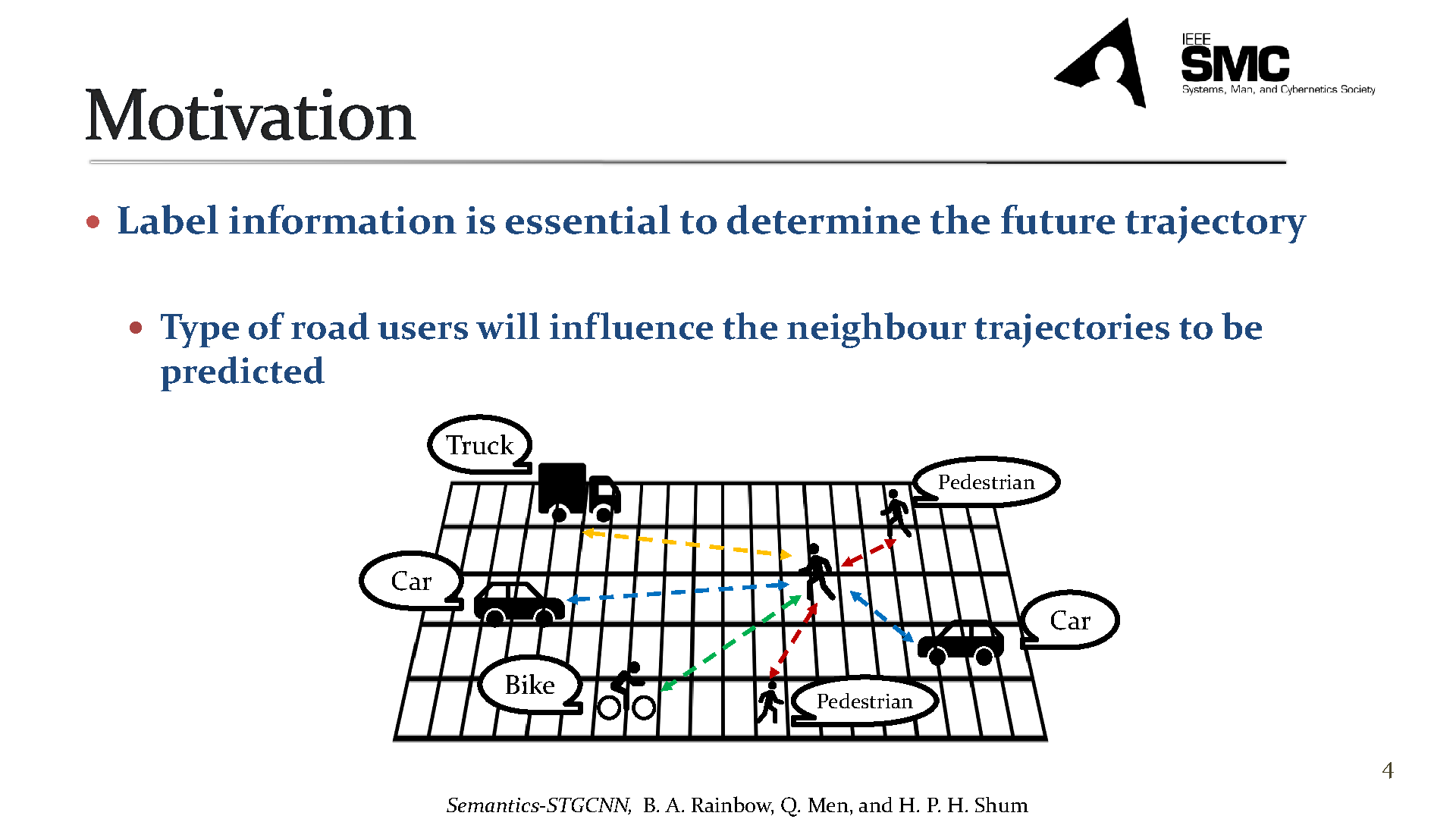
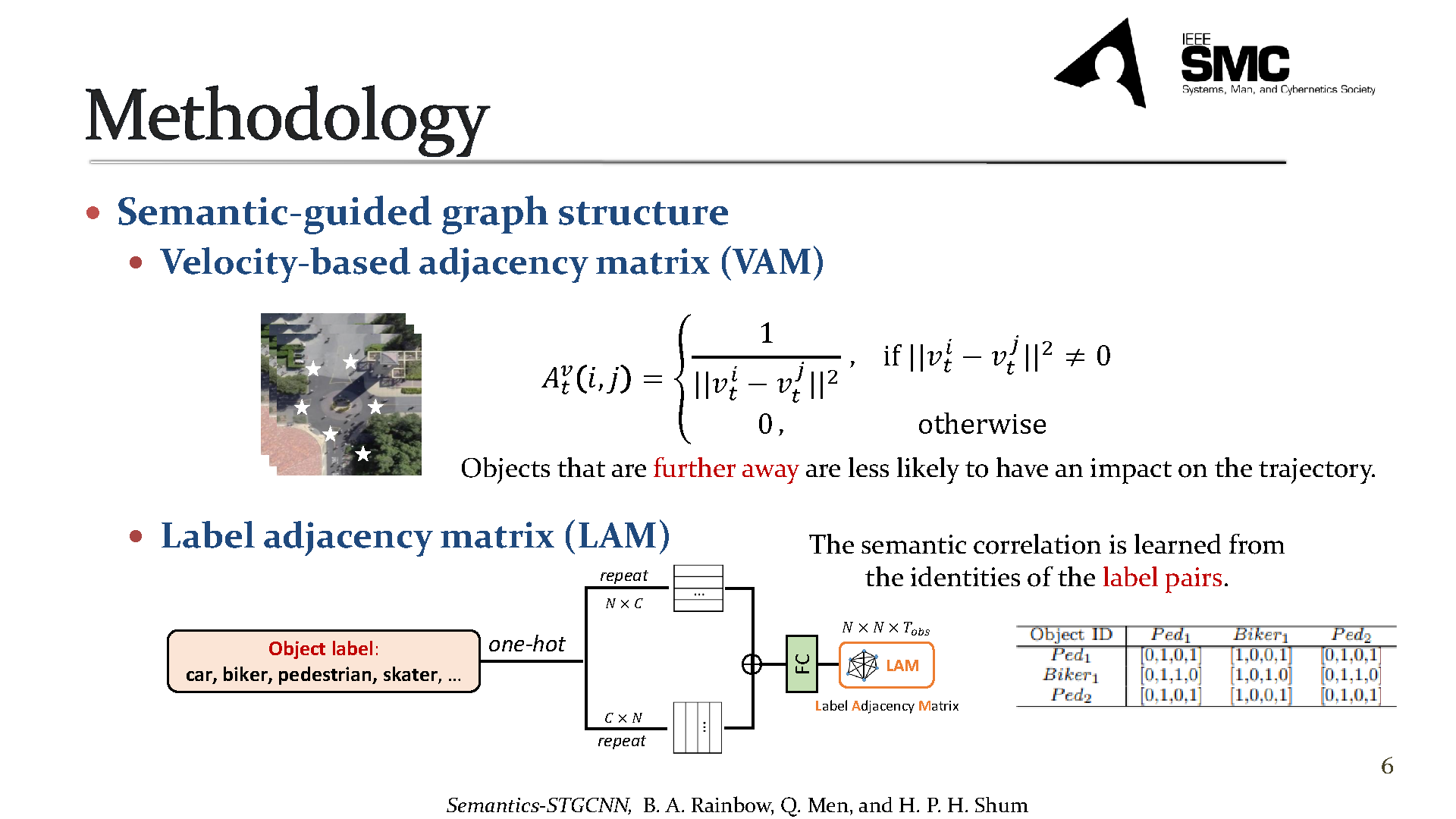
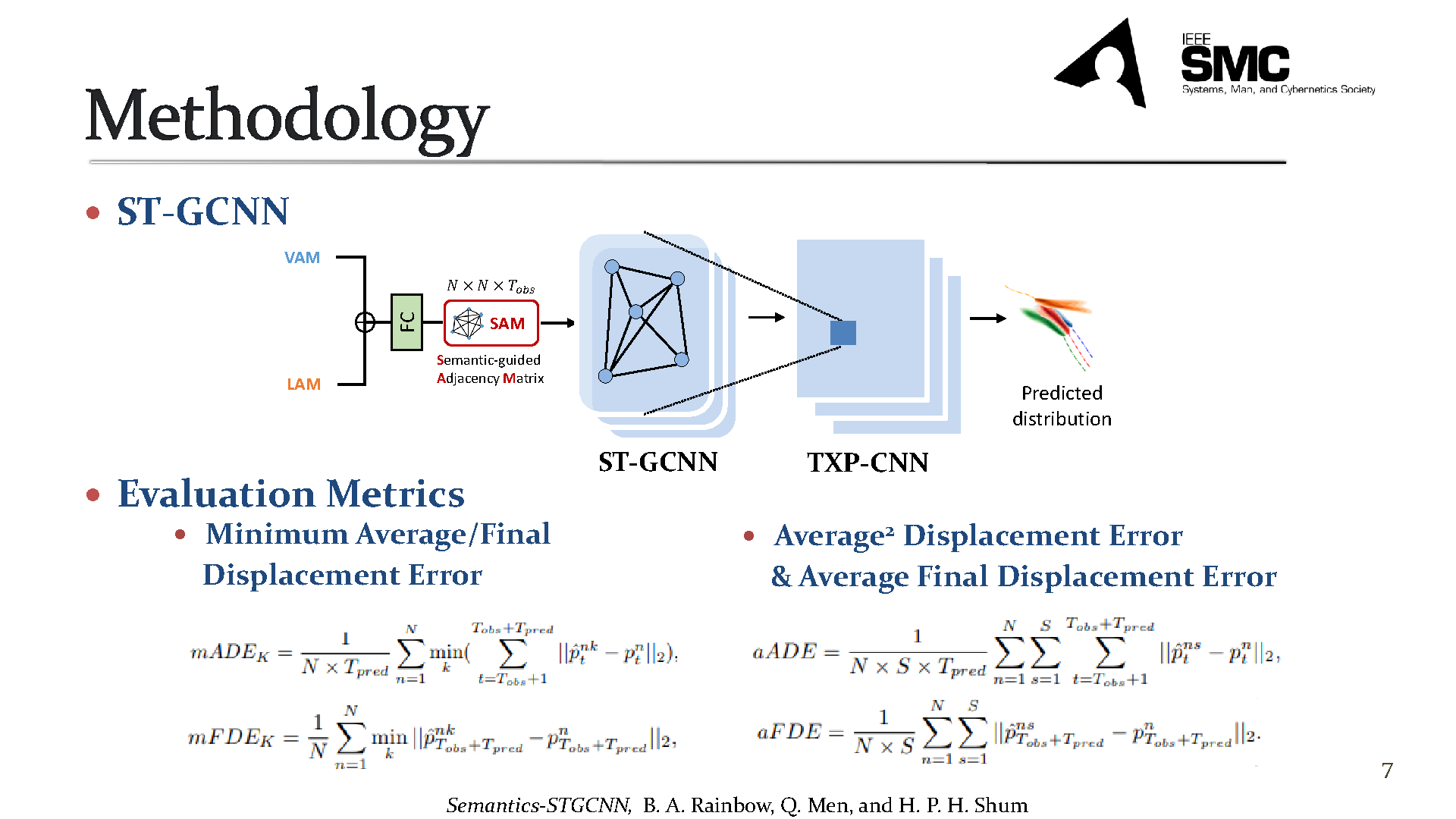
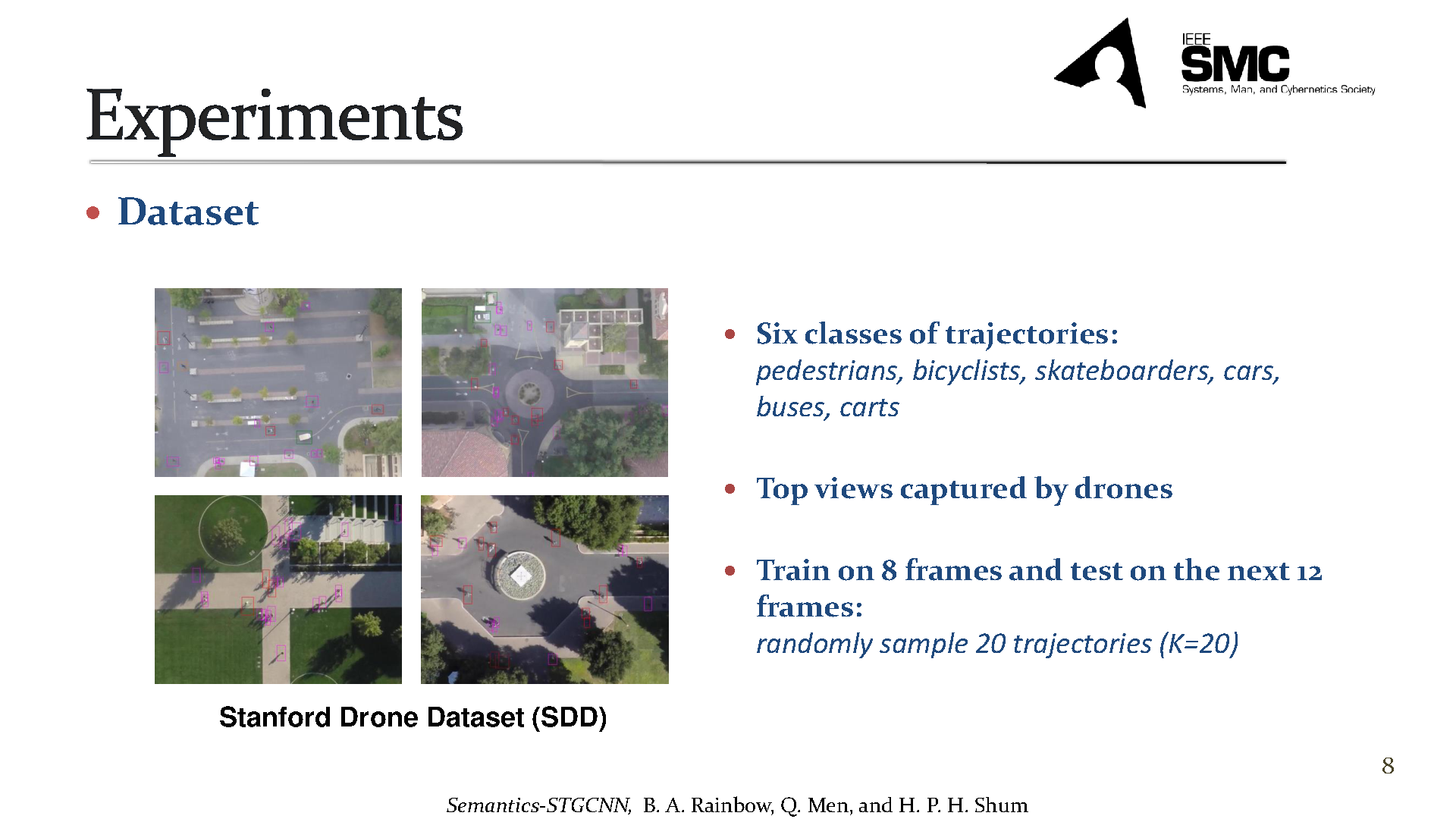
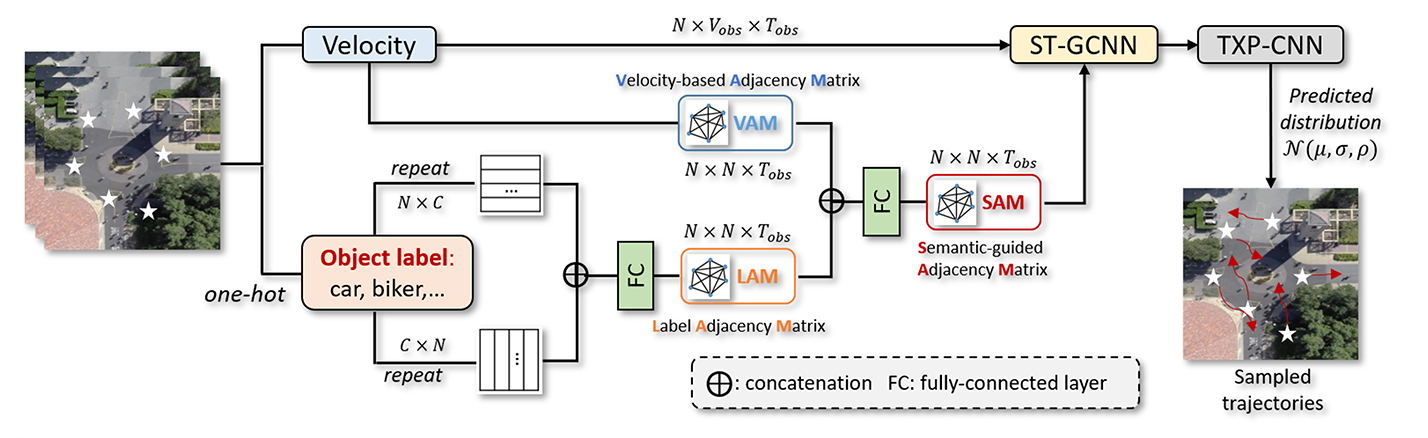
Predicting the movement trajectories of multiple classes of road users in real-world scenarios is a challenging task due to the diverse trajectory patterns. While recent works of pedestrian trajectory prediction successfully modelled the influence of surrounding neighbours based on the relative distances, they are ineffective on multi-class trajectory prediction. This is because they ignore the impact of the implicit correlations between different types of road users on the trajectory to be predicted - for example, a nearby pedestrian has a different level of influence from a nearby car. In this paper, we propose to introduce class information into a graph convolutional neural network to better predict the trajectory of an individual. We embed the class labels of the surrounding objects into the label adjacency matrix (LAM), which is combined with the velocity-based adjacency matrix (VAM) comprised of the objects' velocity, thereby generating a semantics-guided graph adjacency (SAM). SAM effectively models semantic information with trainable parameters to automatically learn the embedded label features that will contribute to the fixed velocity-based trajectory. Such information of spatial and temporal dependencies is passed to a graph convolutional and temporal convolutional network to estimate the predicted trajectory distributions. We further propose new metrics, known as Average2 Displacement Error (aADE) and Average Final Displacement Error (aFDE), that assess network accuracy more accurately. We call our framework Semantics-STGCNN. It consistently shows superior performance to the state-of-the-arts in existing and the newly proposed metrics.