Ergonomics Measurements using Kinect with a Pose Correction Framework
Pierre Plantard, Hubert P. H. Shum and Franck Multon
Proceedings of the 2016 International Digital Human Modeling Symposium (DHM), 2016
Abstract
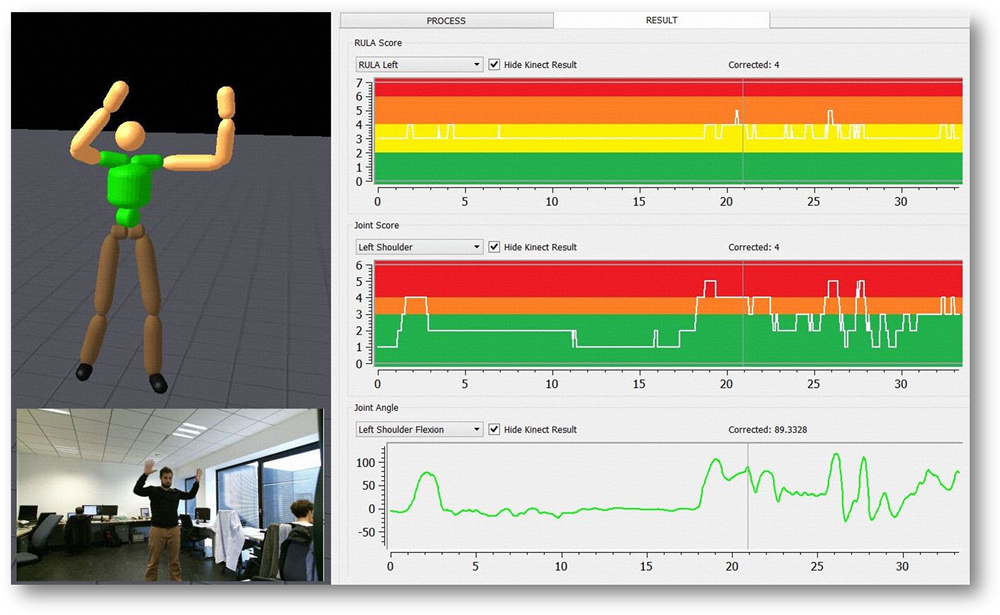
Evaluation of potential risks of musculoskeletal disorders in real workstations is challenging as the environment is cluttered, which makes it difficult to correctly and accurately assess the pose of a worker. Being marker-free and calibration-free, Microsoft Kinect is a promising device to assess these poses, but it can deliver unreliable poses especially when occlusions occur. To overcome this problem, we propose to detect badly recognized body parts and to replace them by an appropriate combination of example poses gathered in a pre-recorded pose. The main contribution of this work is to organize the database as a filtered pose graph structure that enables the system to select relevant candidates for the combination: candidates that ensure continuity with the previous pose and similarity with the available reliable information. We applied the proposed method in a realistic environment that involved sub-optimal Kinect placement and several types of occlusions. An optoelectronic motion capture system was concurrently used to obtain ground truth joint angles. In an ergonomics context, we also computed Rapid Upper Limb Assessment RULA scores. This kind of ergonomics tool requires to rate the pose of the worker based on an estimation of the joint angles. These latter are then used to provide a global risk score. Results showed that when occlusions occur, the inaccurate raw Kinect data could be significantly improved using our correction method, leading to acceptable joint angles. As RULA calculation is based on angular thresholds, which tends to minimize the effect of joint angle errors, when these error values are not close to thresholds. However, for realistic scenarios with occlusions that lead to very large joint angle errors, the correction method also provided significantly better RULA scores. Our method opens new perspectives to define new fatigue or solicitation indexes based on continuous measurement contrary to classical static images used in ergonomics. As the computation time is very low, it also enables real-time feedback and interaction with the operator.