Formation Control for UAVs Using a Flux Guided Approach
John Hartley, Hubert P. H. Shum, Edmond S. L. Ho, He Wang and Subramanian Ramamoorthy
Expert Systems with Applications (ESWA), 2022
Impact Factor: 7.5† Top 25% Journal in Computer Science, Artificial Intelligence† Citation: 15#
Abstract
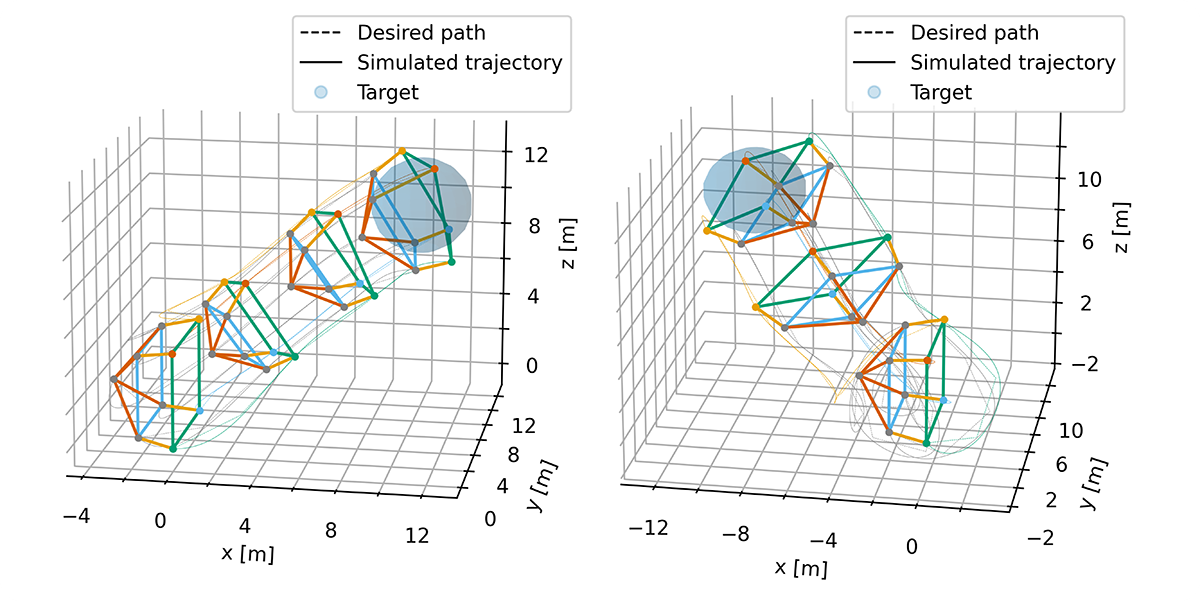
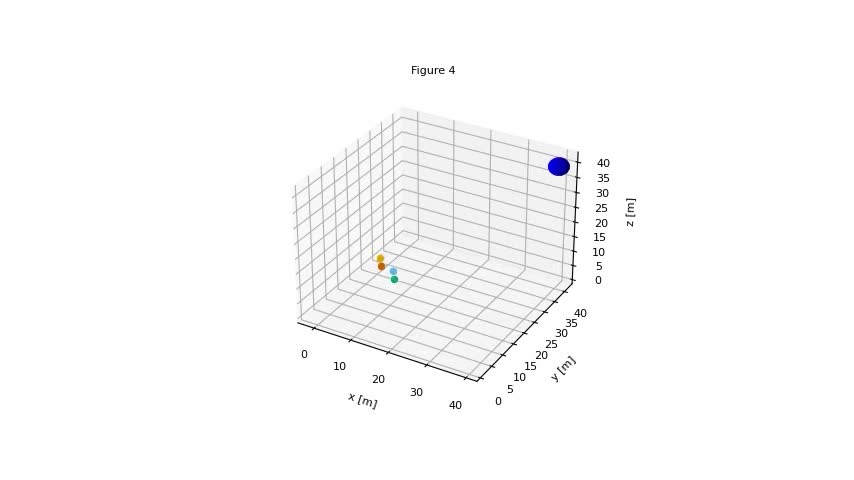
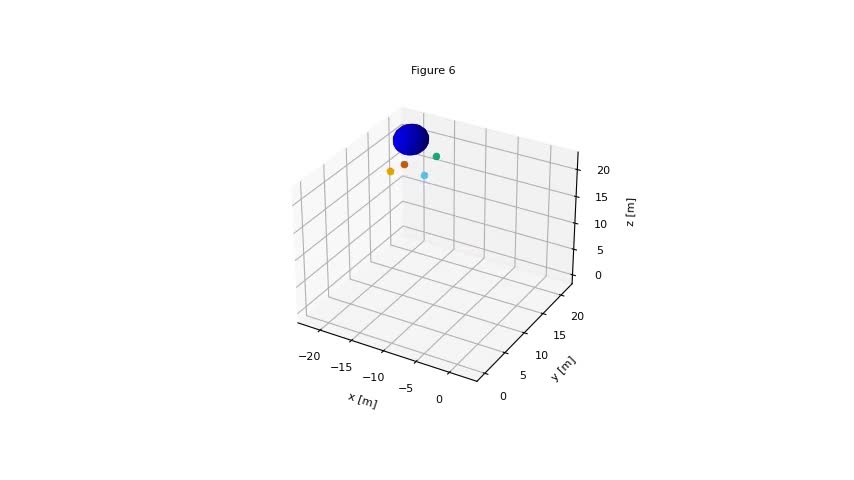
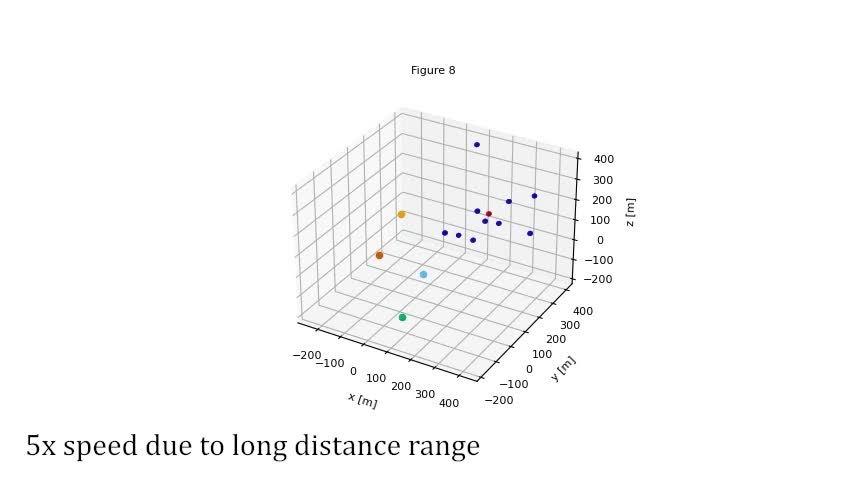
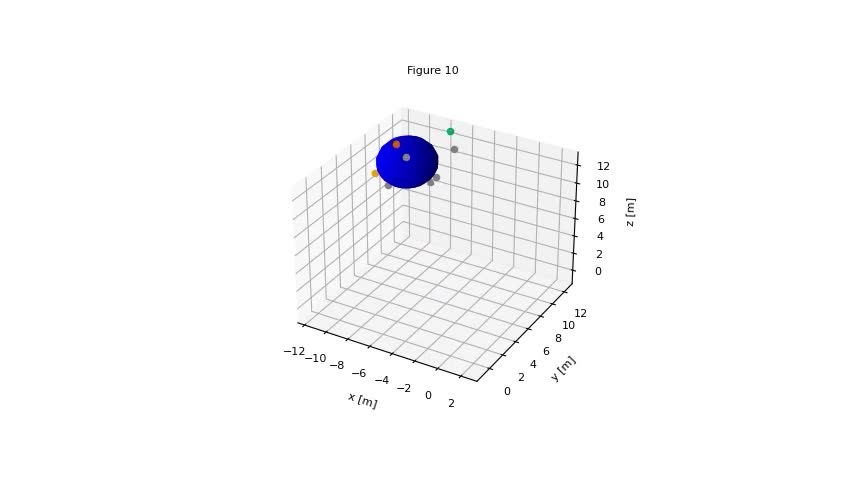
Existing studies on formation control for unmanned aerial vehicles (UAV) have not considered encircling targets where an optimum coverage of the target is required at all times. Such coverage plays a critical role in many real-world applications such as tracking hostile UAVs. This paper proposes a new path planning approach called the Flux Guided (FG) method, which generates collision-free trajectories for multiple UAVs while maximising the coverage of target(s). Our method enables UAVs to track directly toward a target whilst maintaining maximum coverage. Furthermore, multiple scattered targets can be tracked by scaling the formation during flight. FG is highly scalable since it only requires communication between sub-set of UAVs on the open boundary of the formation's surface. Experimental results further validate that FG generates UAV trajectories $1.5X shorter than previous work and that trajectory planning for 9 leader/follower UAVs to surround a target in two different scenarios only requires 0.52 seconds and 0.88 seconds, respectively. The resulting trajectories are suitable for robotic controls after time-optimal parameterisation; we demonstrate this using a 3d dynamic particle system that tracks the desired trajectories using a PID controller.




YouTube
Cite This Research
Supporting Grants
Defence and Security Accelerator (Ref: DSTLX-1000140725, ACC6007422): £124,901, Principal Investigator
Received from The Ministry of Defence (DASA), UK, 2019-2020
Project Page