A Hybrid Metaheuristic Navigation Algorithm for Robot Path Rolling Planning in an Unknown Environment
Shoujiang Xu, Edmond S. L. Ho and Hubert P. H. Shum
Mechatronic Systems and Control (MSC), 2019
Abstract
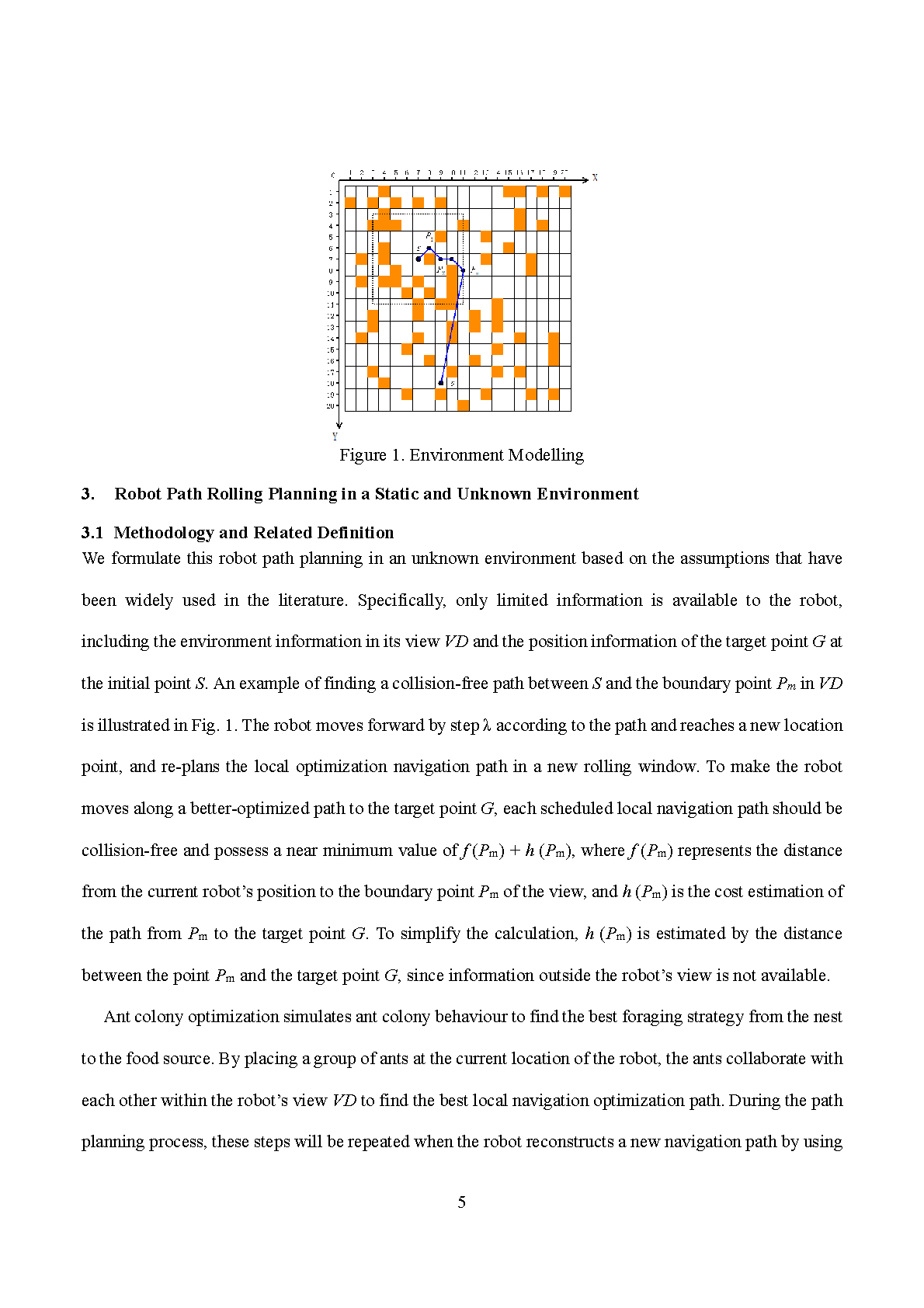
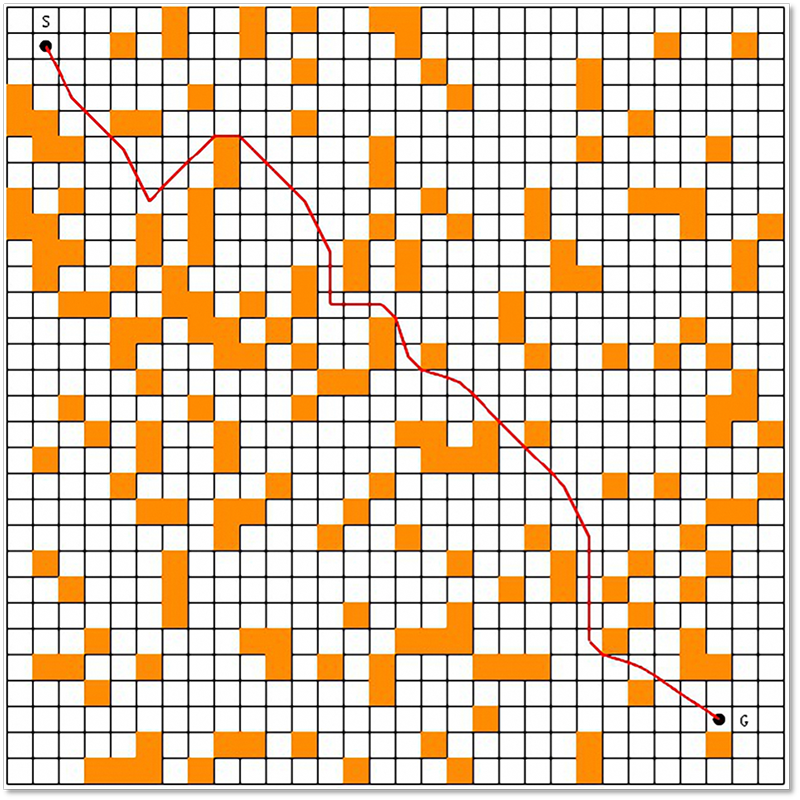
In this paper, a new method for robot path rolling planning in a static and unknown environment based on grid modelling is proposed. In an unknown scene, a local navigation optimization path for the robot is generated intelligently by ant colony optimization (ACO) combined with the environment information of robot’s local view and target information. The robot plans a new navigation path dynamically after certain steps along the previous local navigation path, and always moves along the optimized navigation path which is dynamically modified. The robot will move forward to the target point directly along the local optimization path when the target is within the current view of the robot. This method presents a more intelligent sub-goal mapping method comparing to the traditional rolling window approach. Besides, the path that is part of the generated local path based on the ACO between the current position and the next position of the robot is further optimized using particle swarm optimization (PSO), which resulted in a hybrid metaheuristic algorithm that incorporates ACO and PSO. Simulation results show that the robot can reach the target grid along a global optimization path without collision.