Motion Adaptation for Humanoid Robots in Constrained Environments
Edmond S. L. Ho and Hubert P. H. Shum
Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), 2013
H5-Index: 129# Core A* Conference‡ Citation: 30#
Abstract
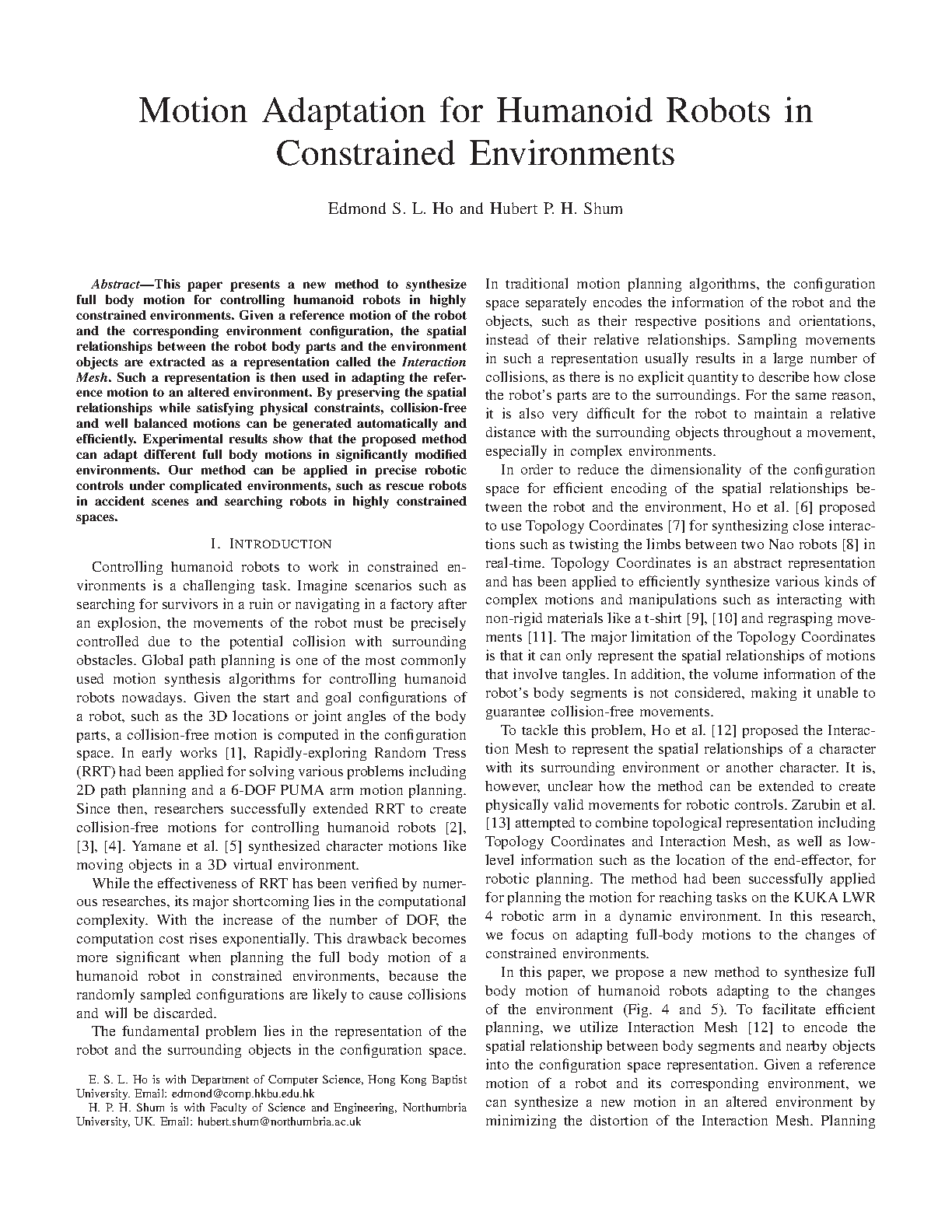
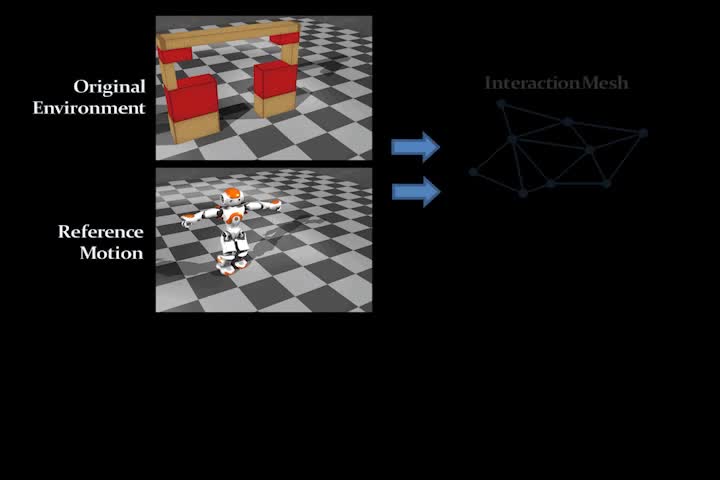
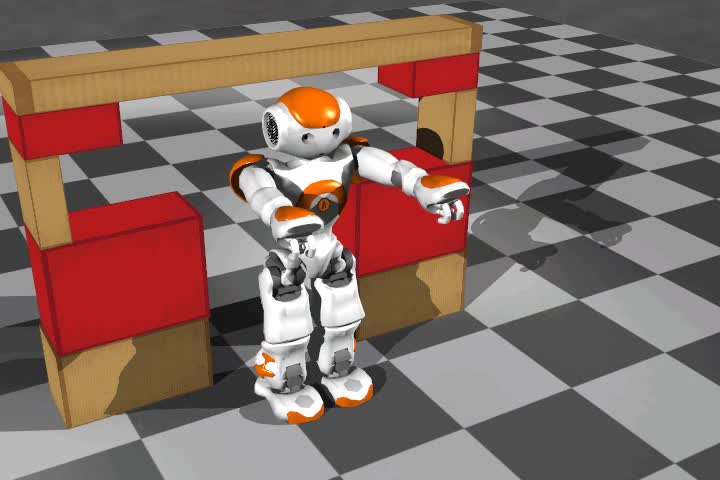
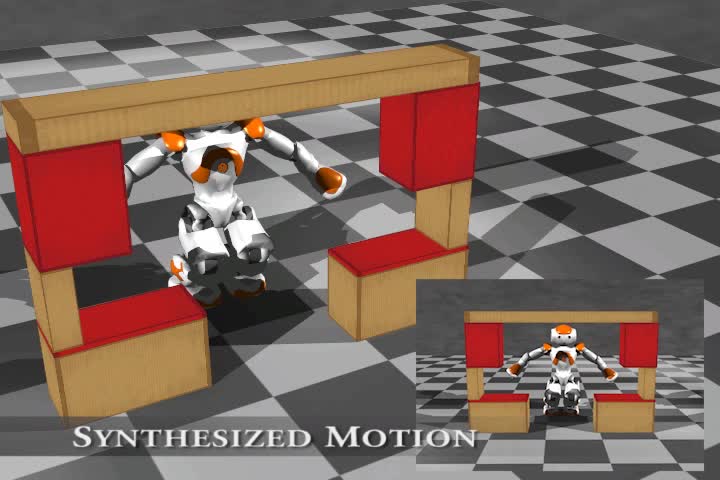
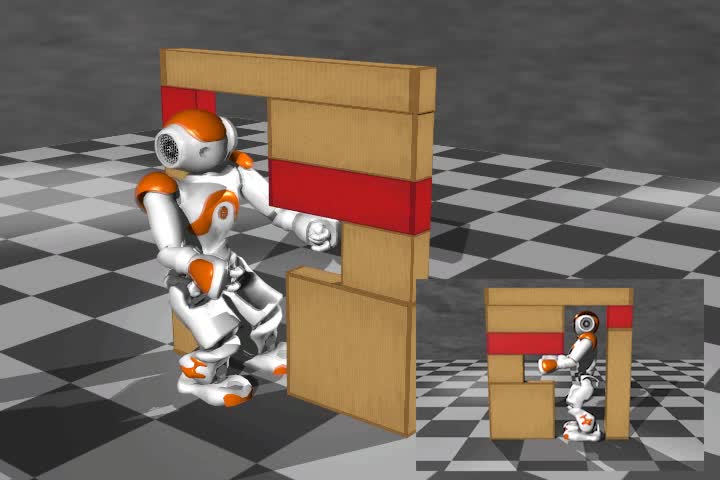
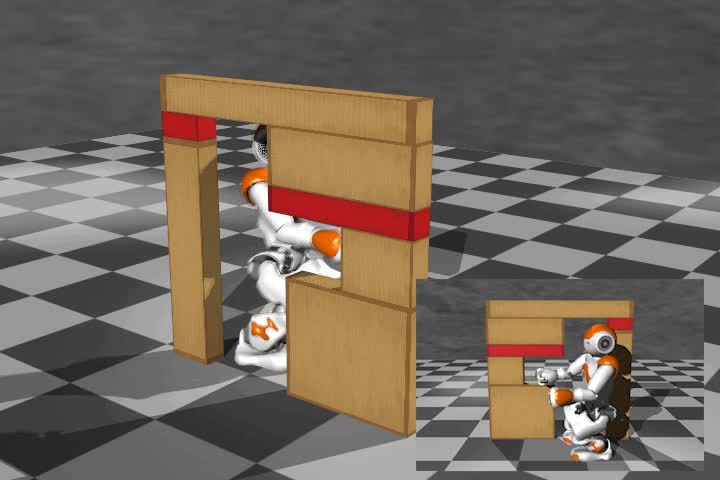
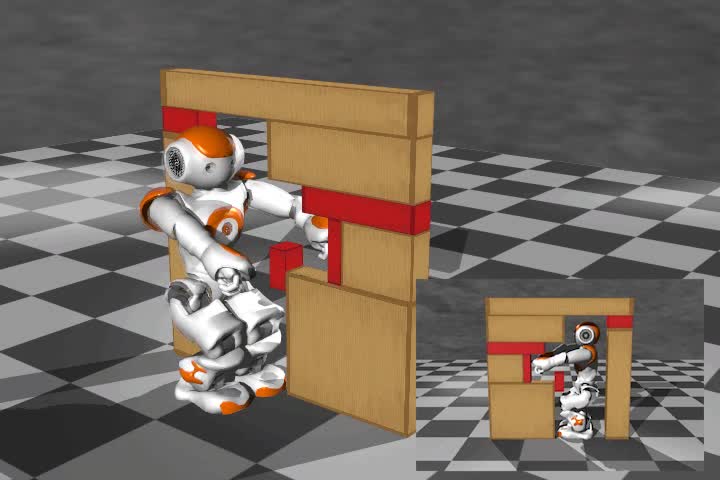
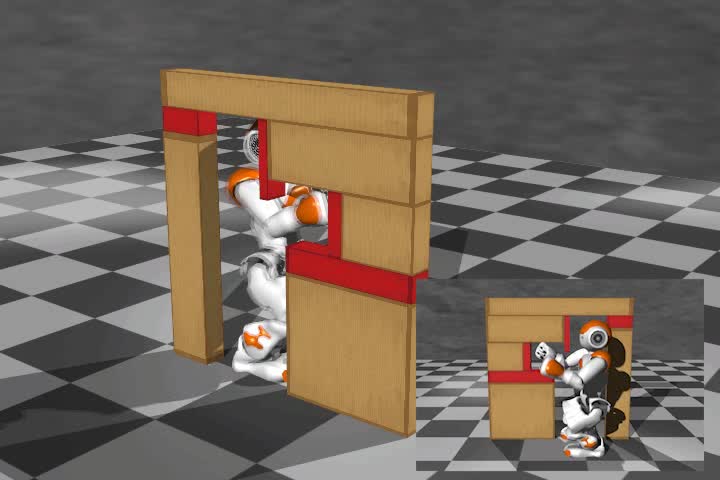
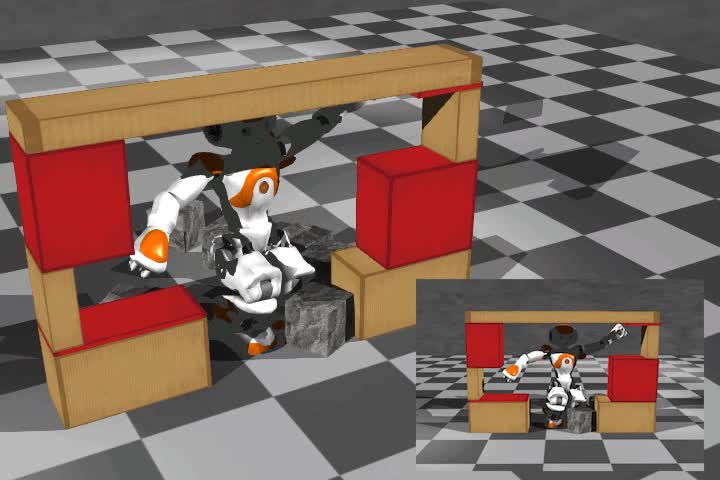
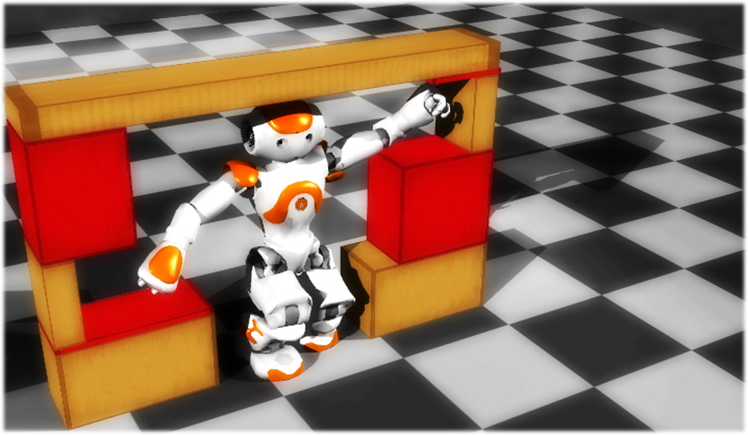
This paper presents a new method to synthesize full body motion for controlling humanoid robots in highly constrained environments. Given a reference motion of the robot and the corresponding environment configuration, the spatial relationships between the robot body parts and the environment objects are extracted as a representation called the Interaction Mesh. Such a representation is then used in adapting the reference motion to an altered environment. By preserving the spatial relationships while satisfying physical constraints, collision-free and well balanced motions can be generated automatically and efficiently. Experimental results show that the proposed method can adapt different full body motions in significantly modified environments. Our method can be applied in precise robotic controls under complicated environments, such as rescue robots in accident scenes and searching robots in highly constrained spaces.