Topology Aware Data-Driven Inverse Kinematics
Edmond S. L. Ho, Hubert P. H. Shum, Yiu-ming Cheung and P. C. Yuen
Computer Graphics Forum (CGF) - Proceedings of the 2013 Pacific Conference on Computer Graphics and Applications (PG), 2013
Impact Factor: 2.9† Citation: 29#
Abstract
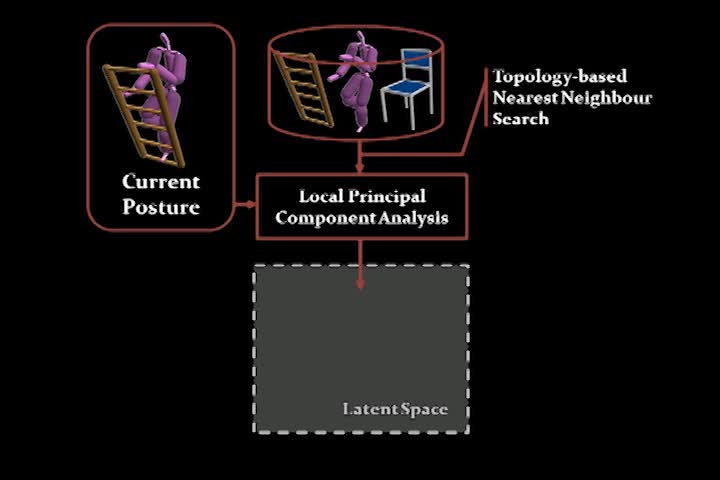
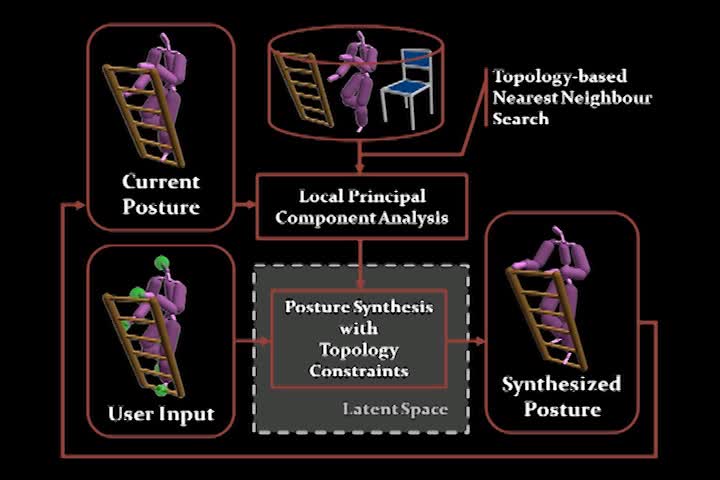
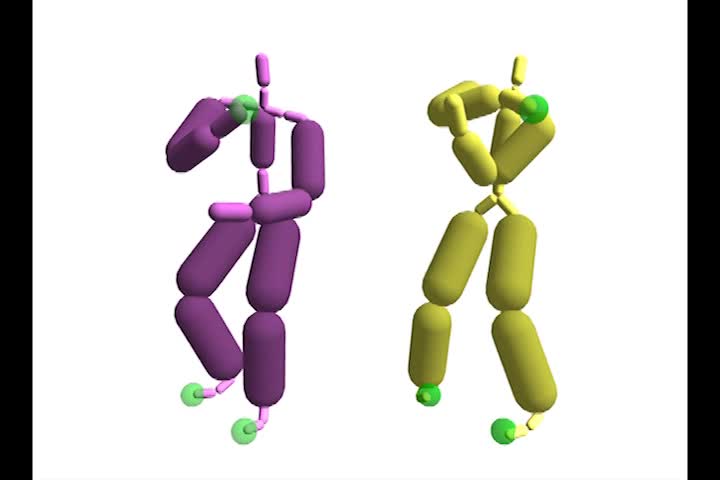
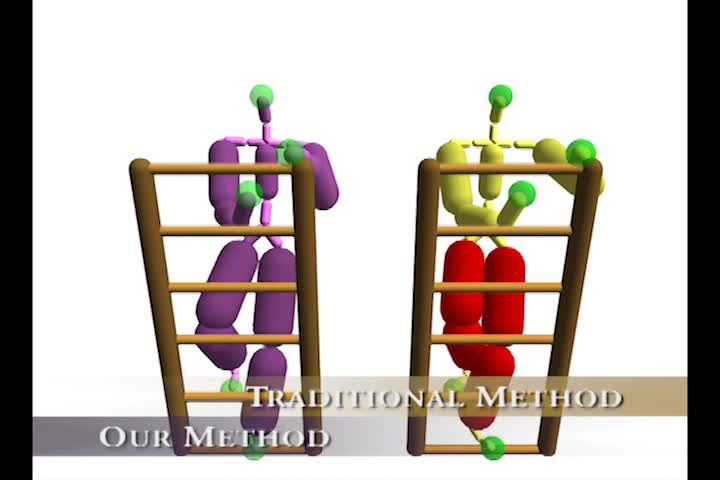
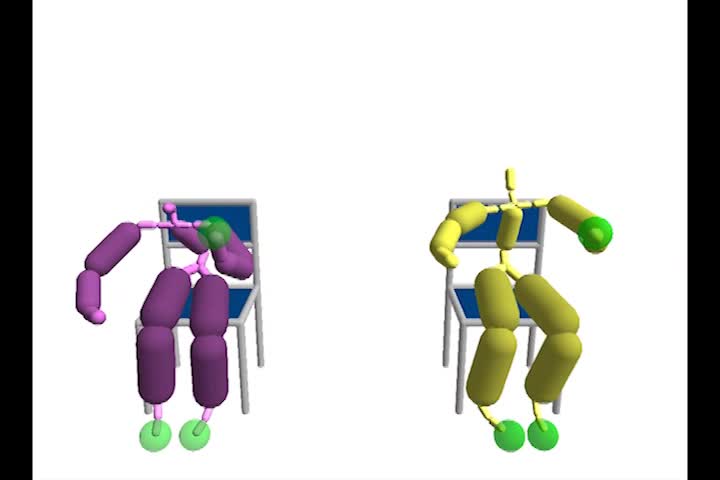
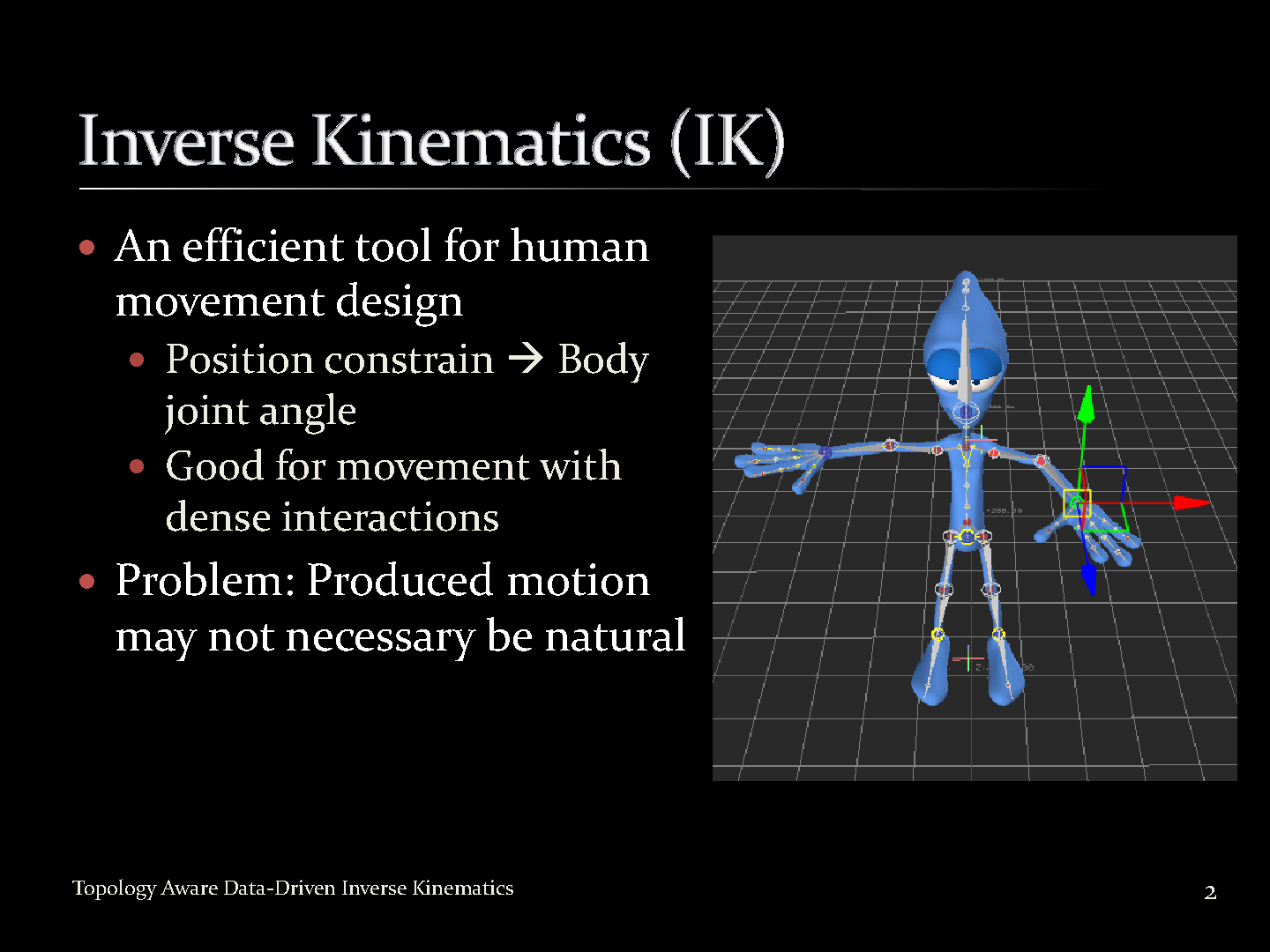
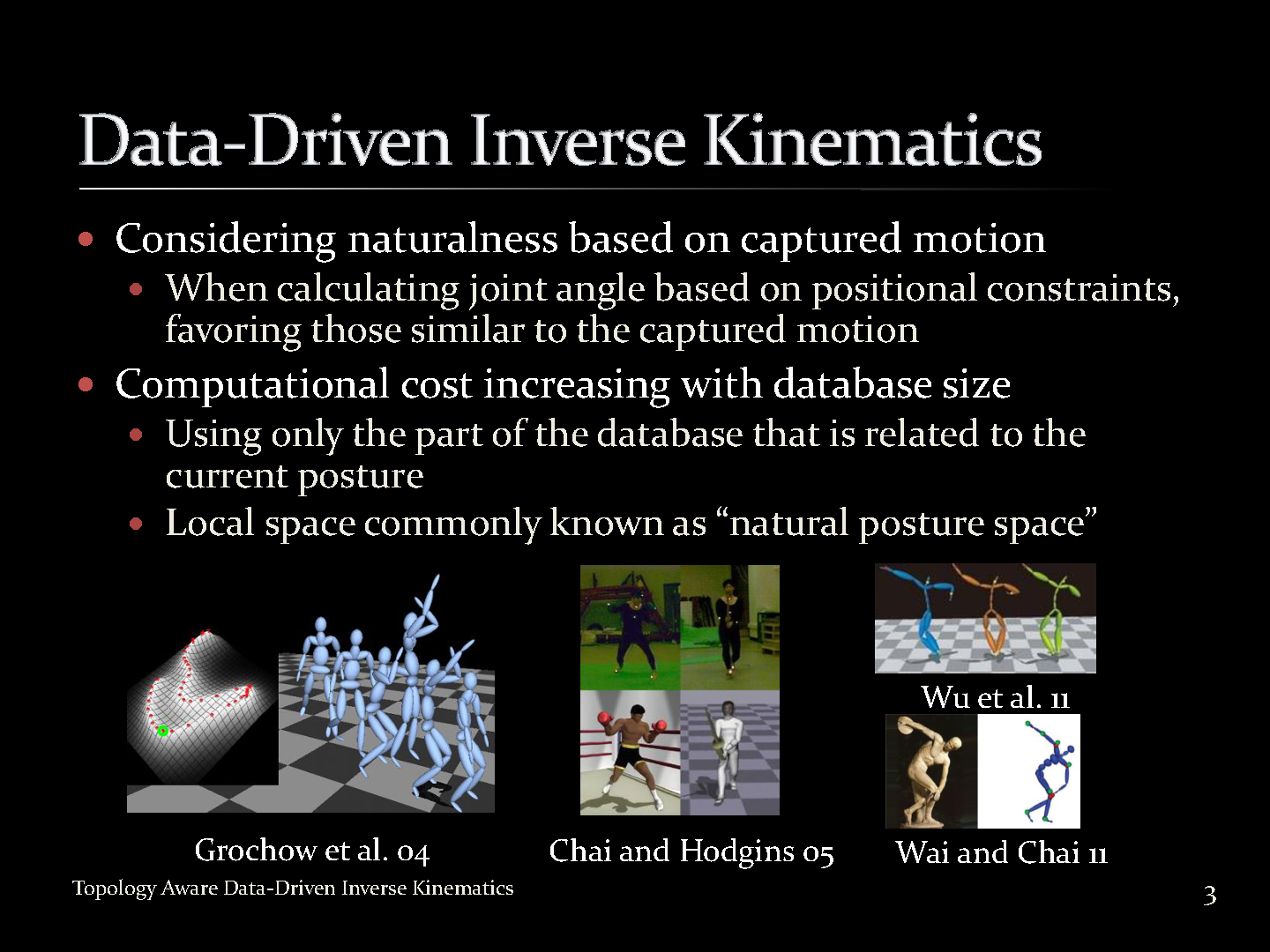
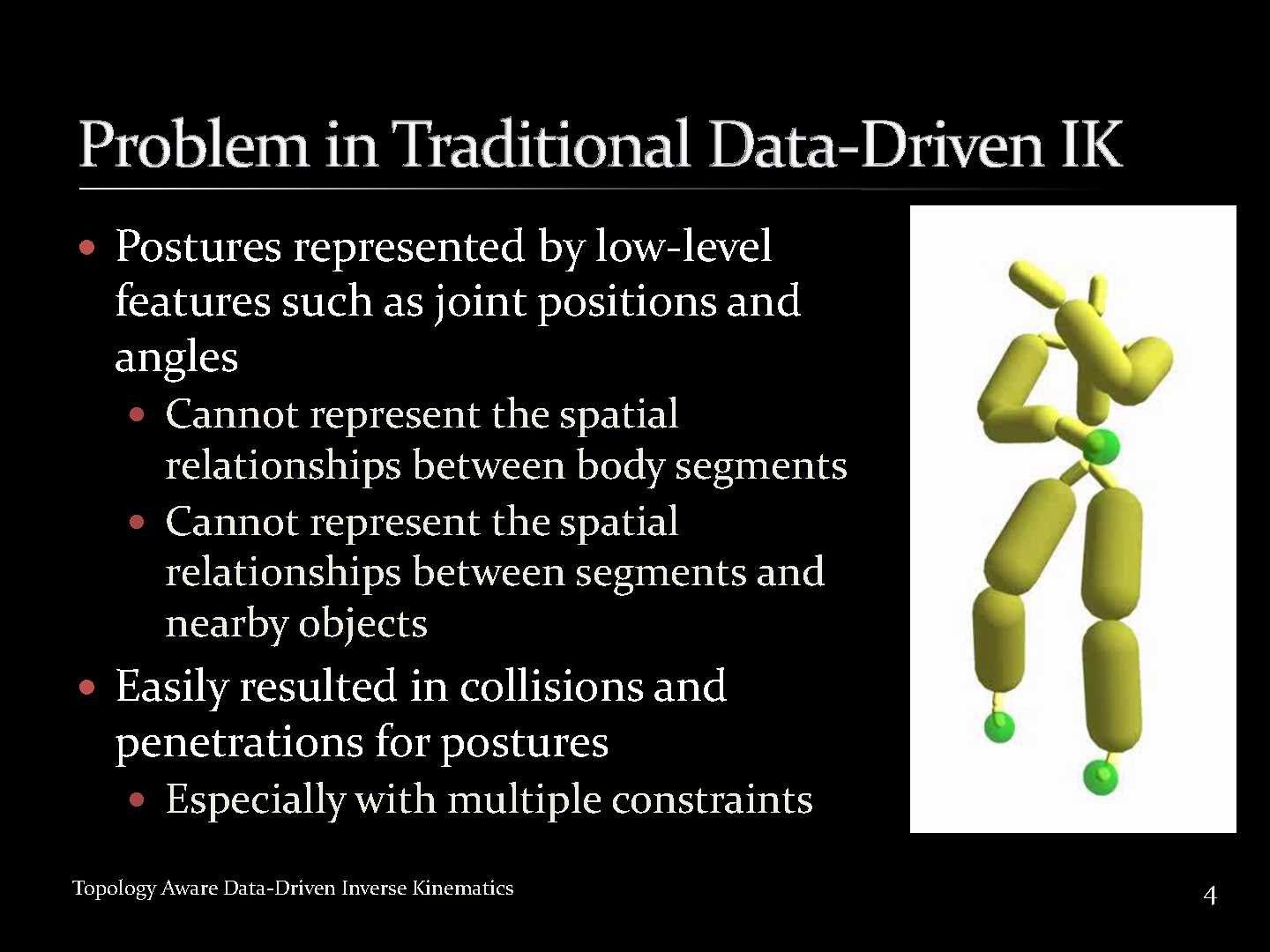
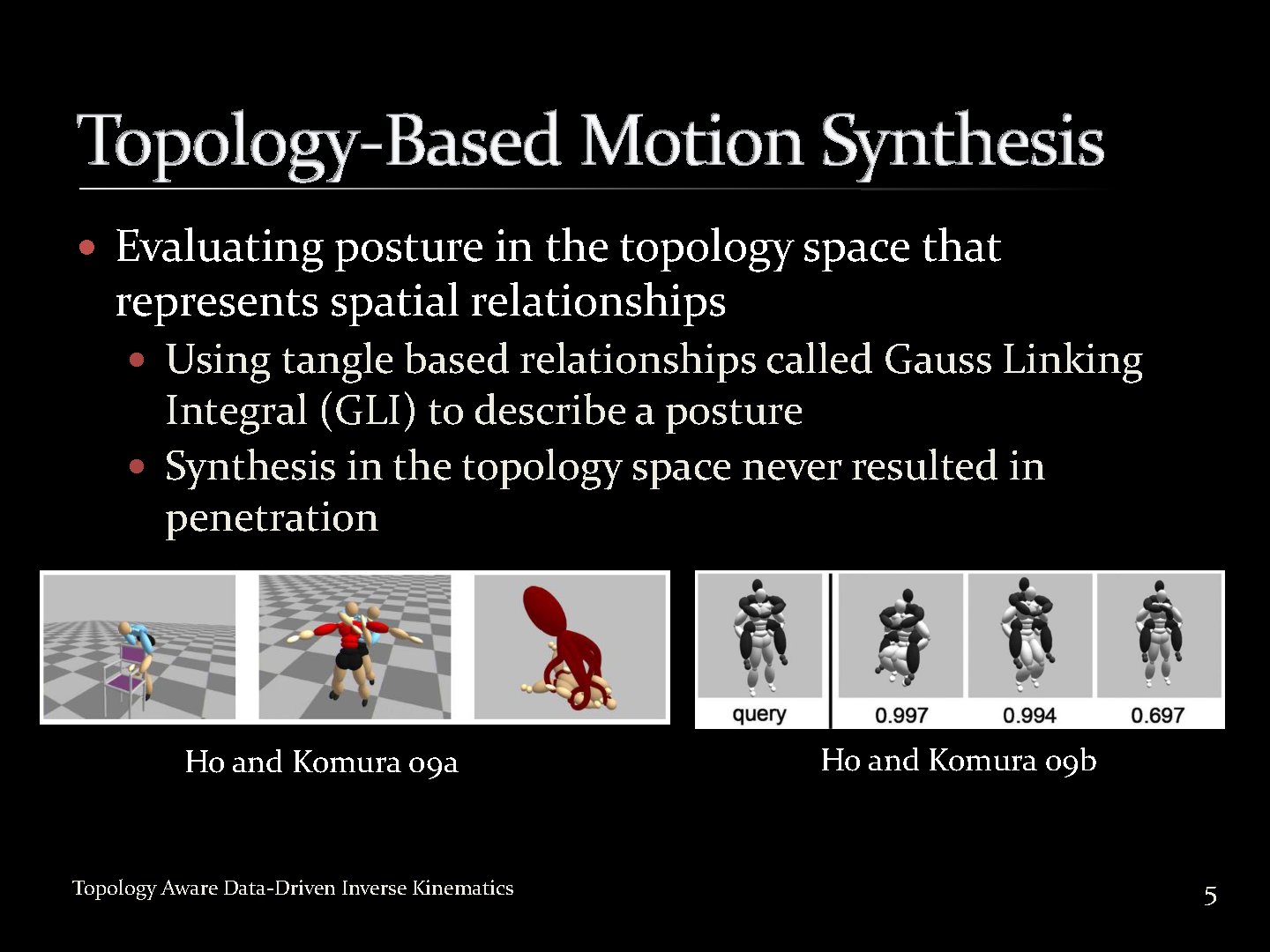
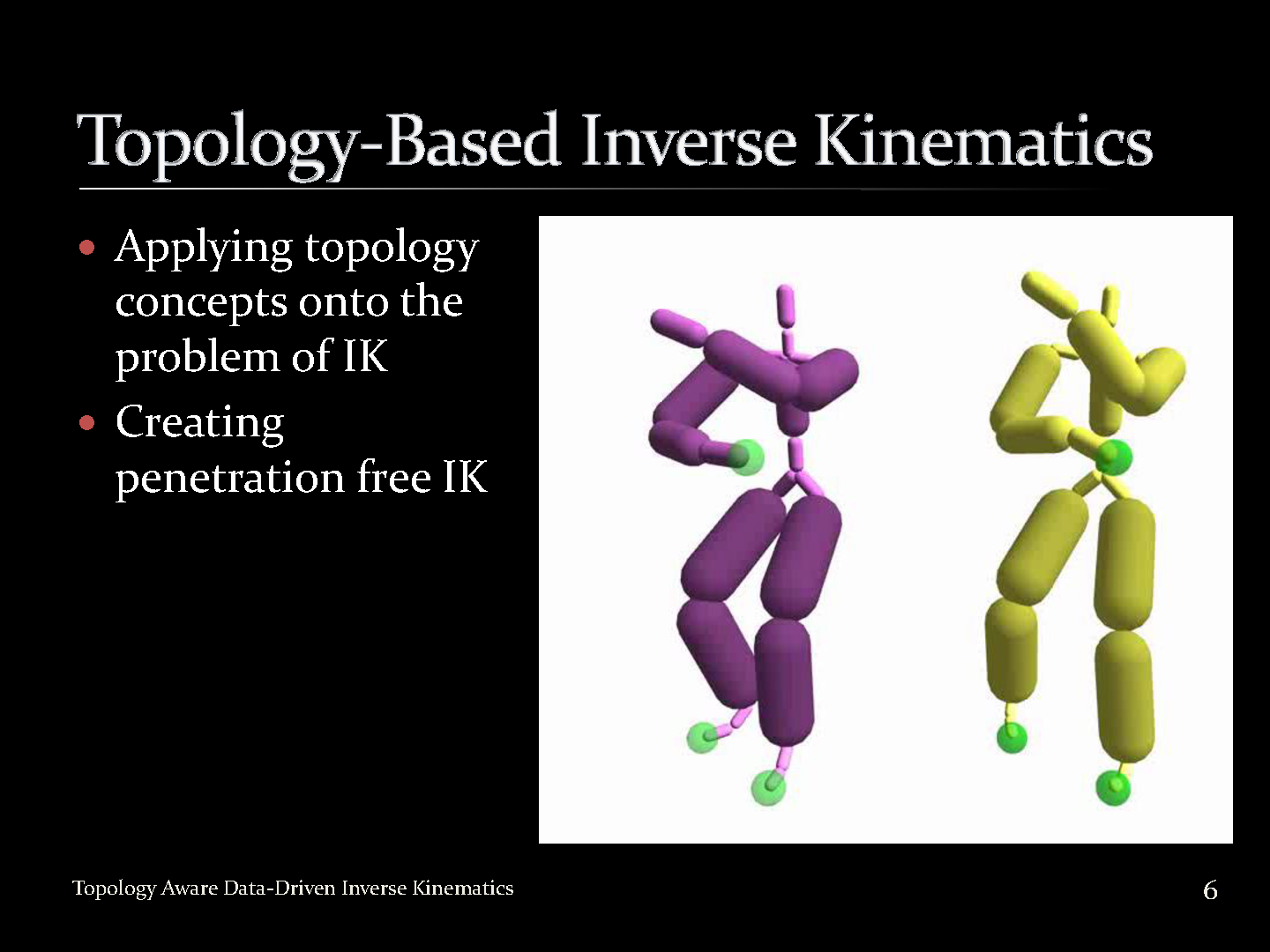
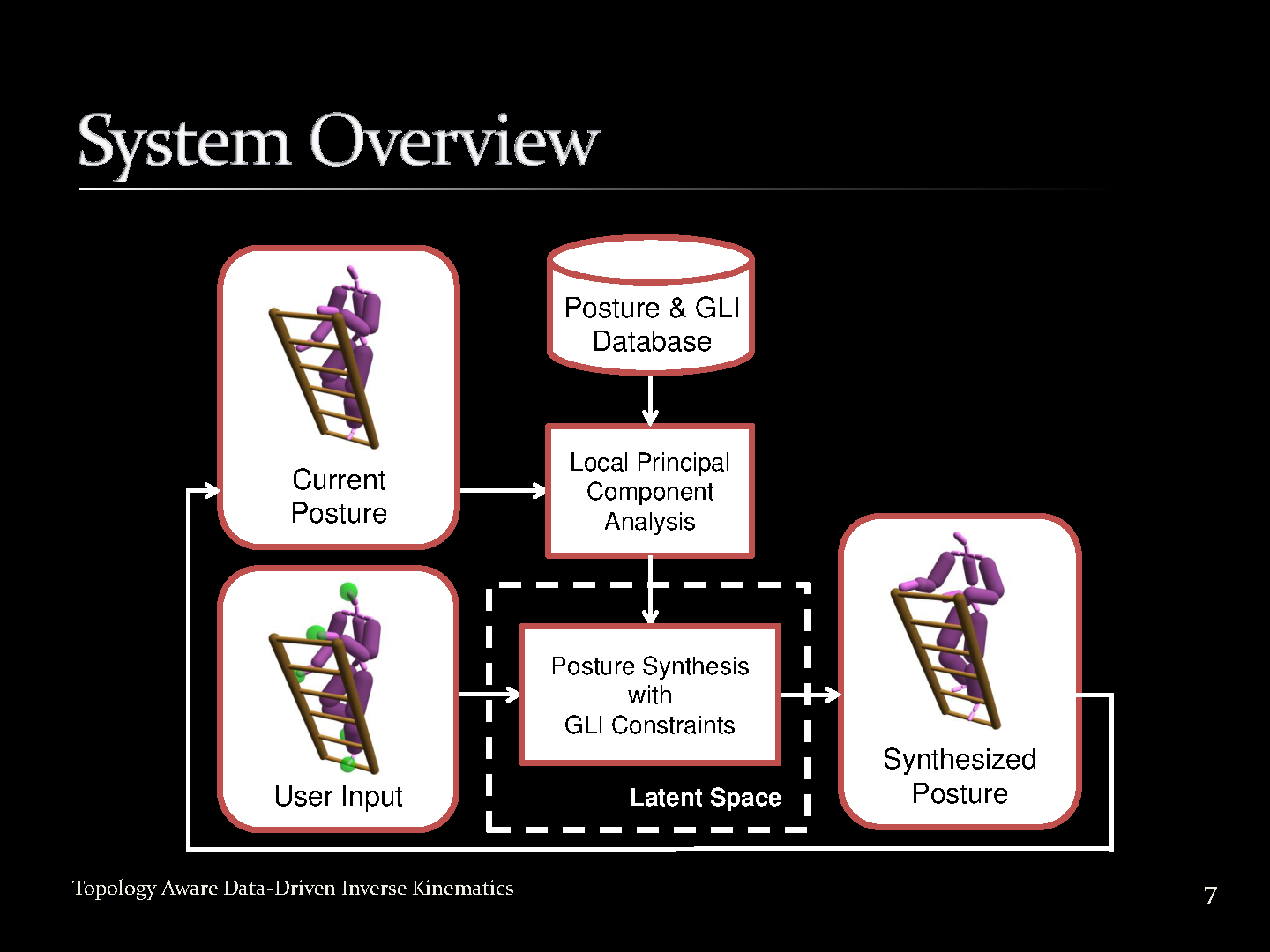
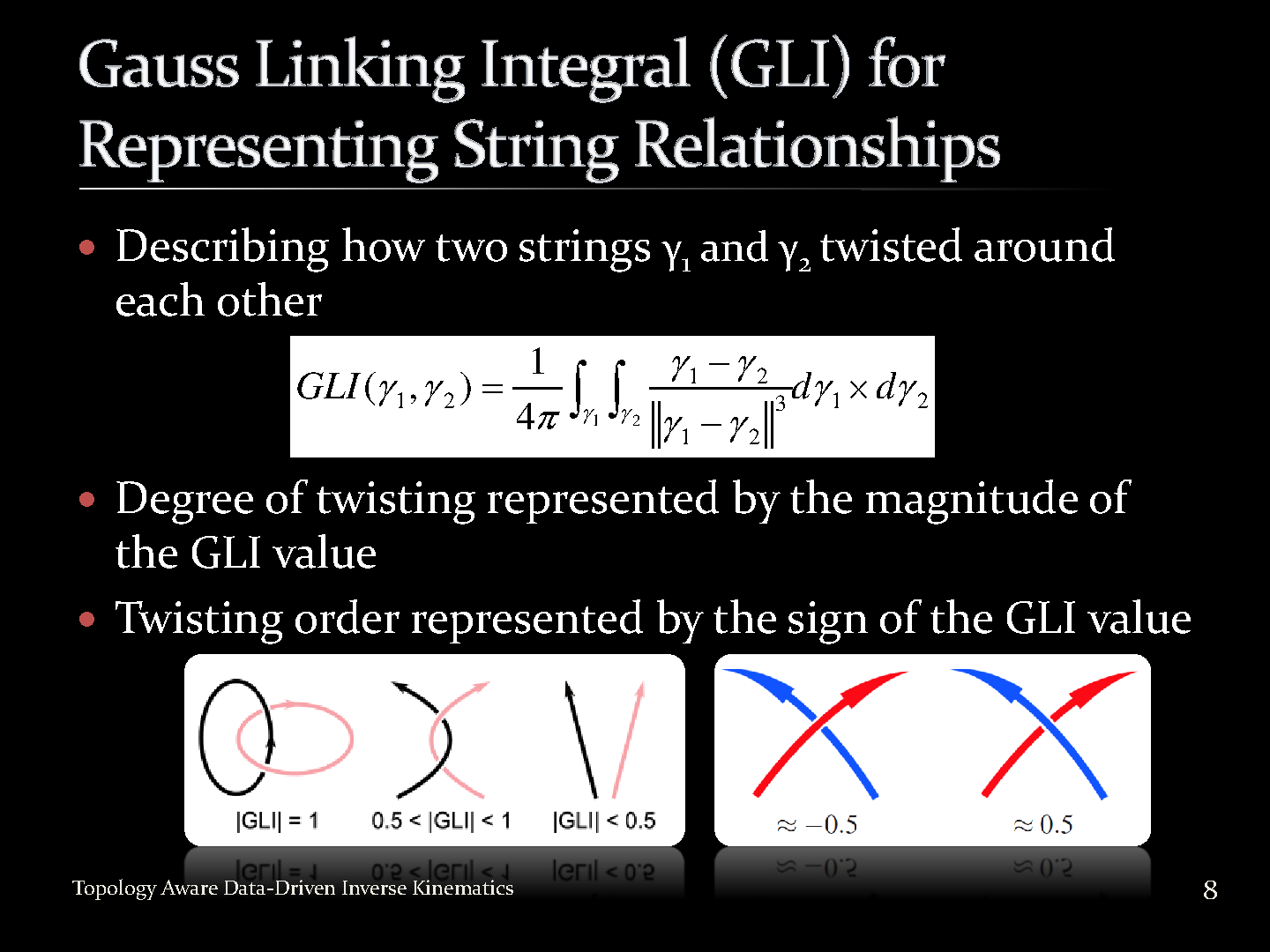
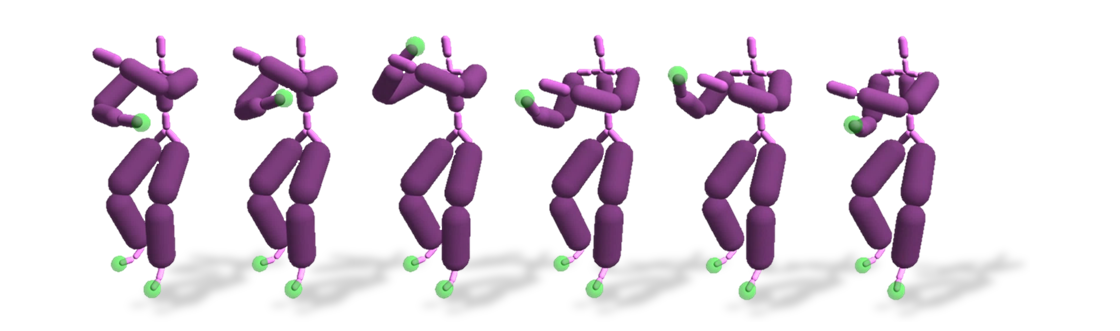
Creating realistic human movement is a time consuming and labour intensive task. The major difficulty is that the user has to edit individual joints while maintaining an overall realistic and collision free posture. Previous research suggests the use of data-driven inverse kinematics, such that one can focus on the control of a few joints, while the system automatically composes a natural posture. However, as a common problem of kinematics synthesis, penetration of body parts is difficult to avoid in complex movements. In this paper, we propose a new data-driven inverse kinematics framework that conserves the topology of the synthesizing postures. Our system monitors and regulates the topology changes using the Gauss Linking Integral (GLI), such that penetration can be efficiently prevented. As a result, complex motions with tight body movements, as well as those involving interaction with external objects, can be simulated with minimal manual intervention. Experimental results show that using our system, the user can create high quality human motion in real-time by controlling a few joints using a mouse or a multi-touch screen. The movement generated is both realistic and penetration free. Our system is best applied for interactive motion design in computer animations and games.