A Virtual Reality Framework for Human-Driver Interaction Research: Safe and Cost-Effective Data Collection
Luca Crosato, Chongfeng Wei, Edmond S. L. Ho, Hubert P. H. Shum and Yuzhu Sun
Proceedings of the 2024 ACM/IEEE International Conference on Human Robot Interaction (HRI), 2024
H5-Index: 52# Core A* Conference‡ Citation: 15#
Abstract
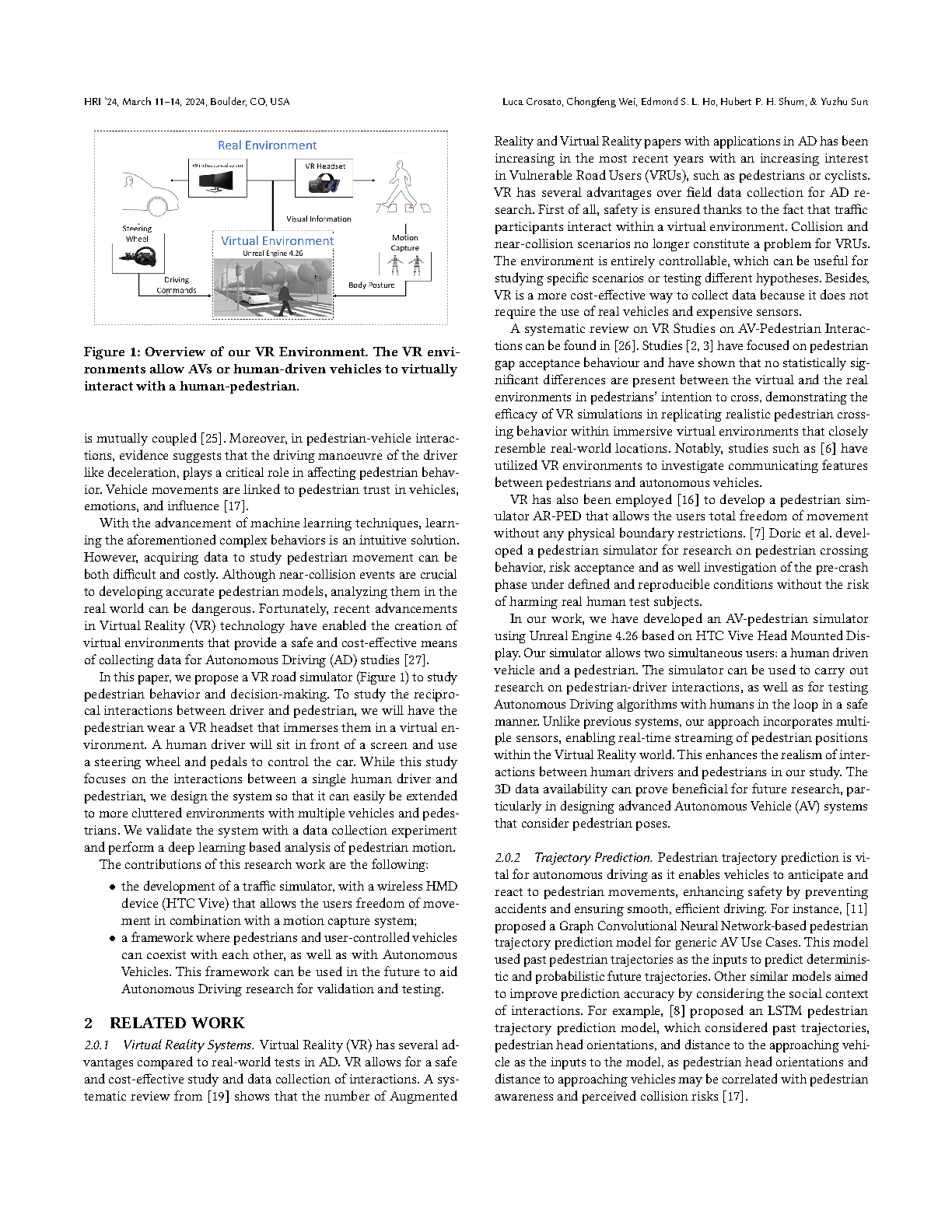
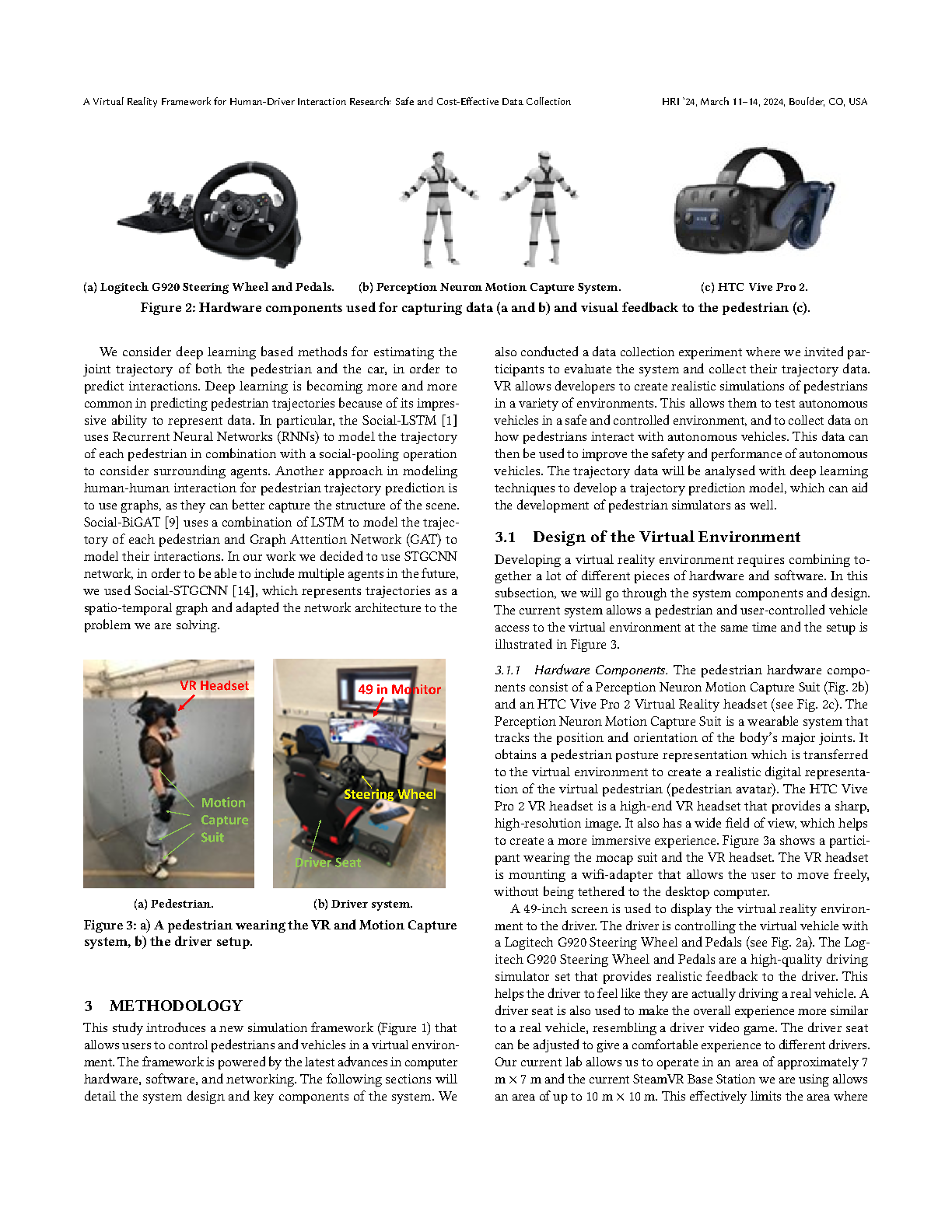
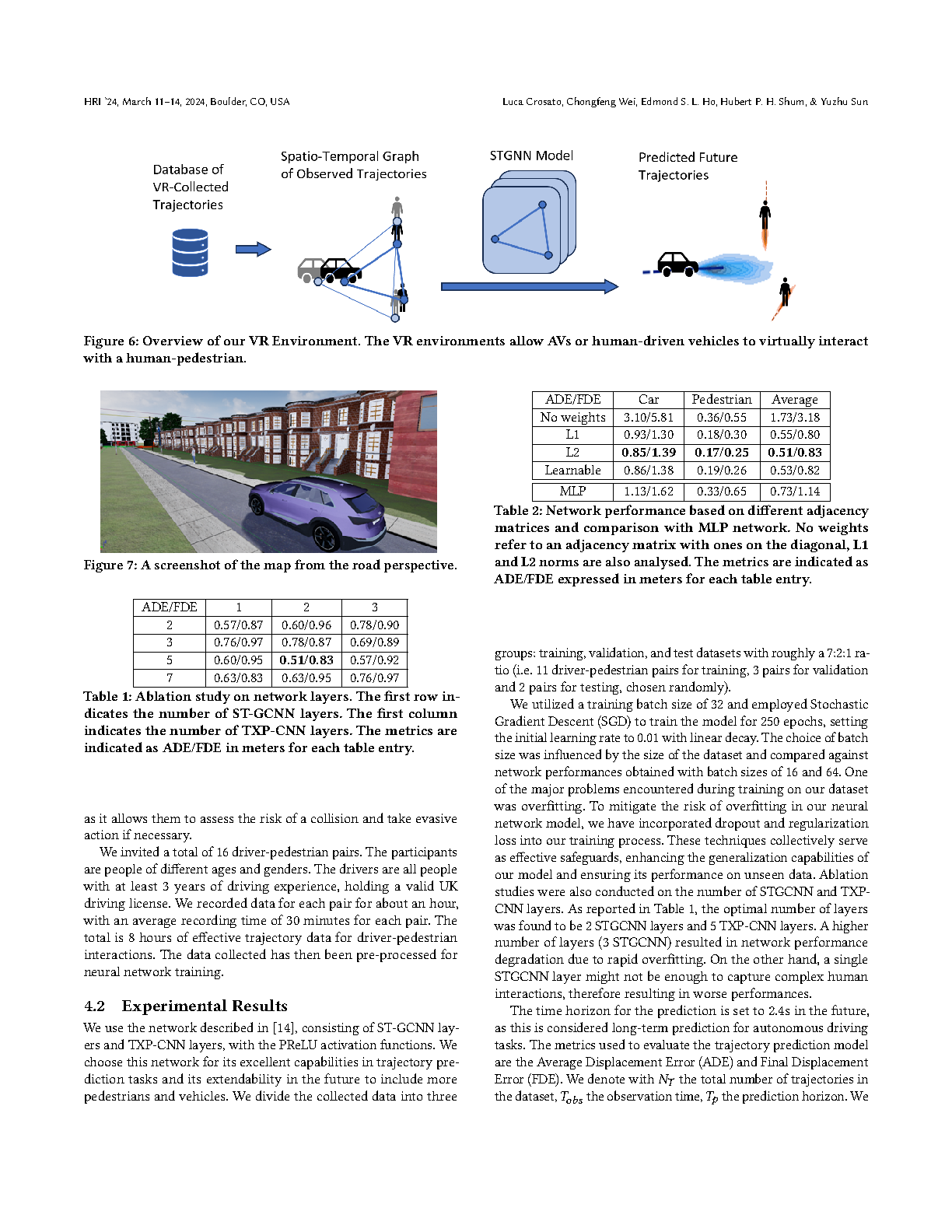
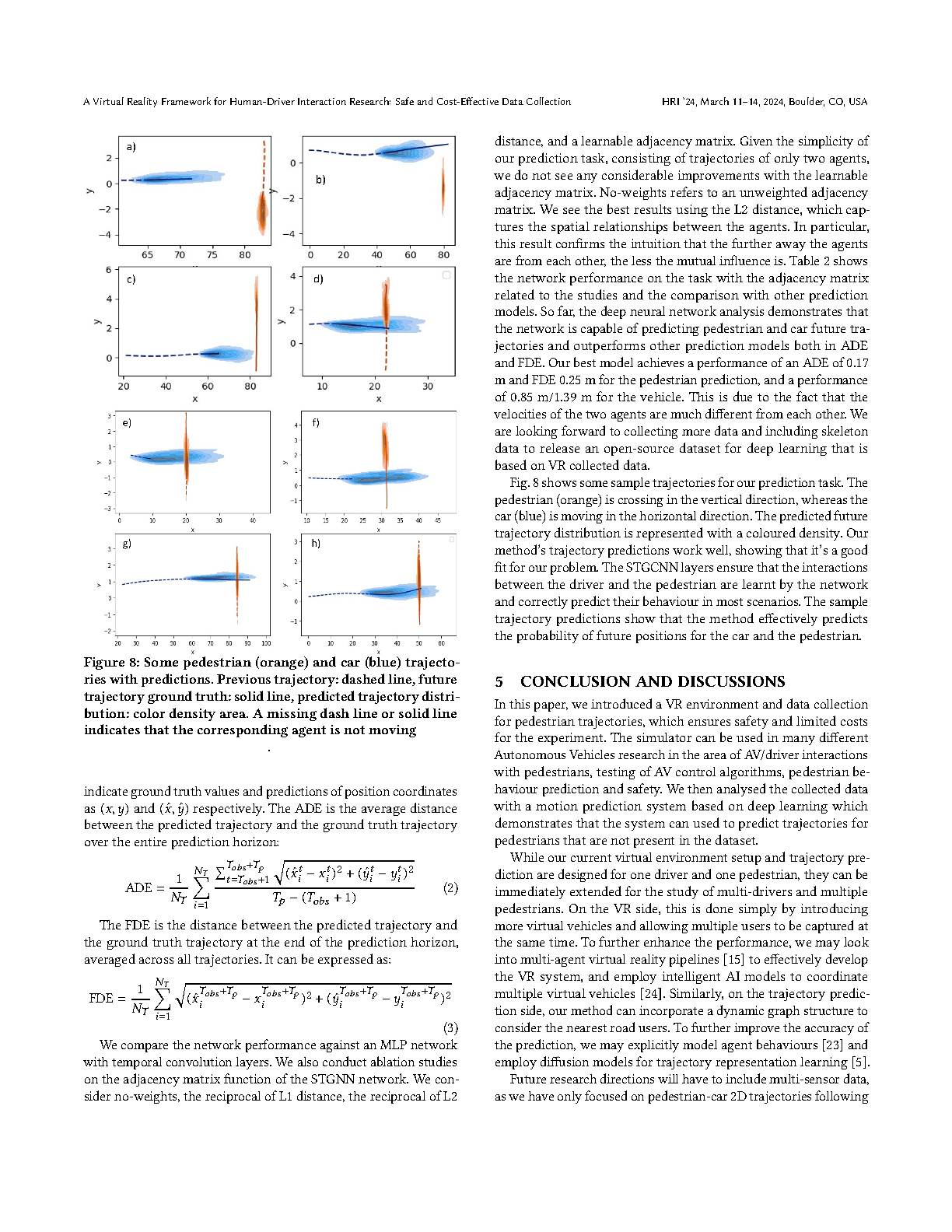
The advancement of automated driving technology has led to new challenges in the interaction between automated vehicles and human road users. However, there is currently no complete theory that explains how human road users interact with vehicles, and studying them in real-world settings is often unsafe and timeconsuming. This study proposes a 3D Virtual Reality (VR) framework for studying how pedestrians interact with human-driven vehicles. The framework uses VR technology to collect data in a safe and cost-effective way, and deep learning methods are used to predict pedestrian trajectories. Specifically, graph neural networks have been used to model pedestrian future trajectories and the probability of crossing the road. The results of this study show that the proposed framework can be for collecting high-quality data on pedestrian-vehicle interactions in a safe and efficient manner. The data can then be used to develop new theories of human-vehicle interaction and aid the Autonomous Vehicles research.