Real-Time Posture Reconstruction for Microsoft Kinect
Hubert P. H. Shum, Edmond S. L. Ho, Yang Jiang and Shu Takagi
IEEE Transactions on Cybernetics (TCyb), 2013
REF 2014 Submitted Output Impact Factor: 10.5† Top 10% Journal in Computer Science, Artificial Intelligence† Citation: 187#
Abstract
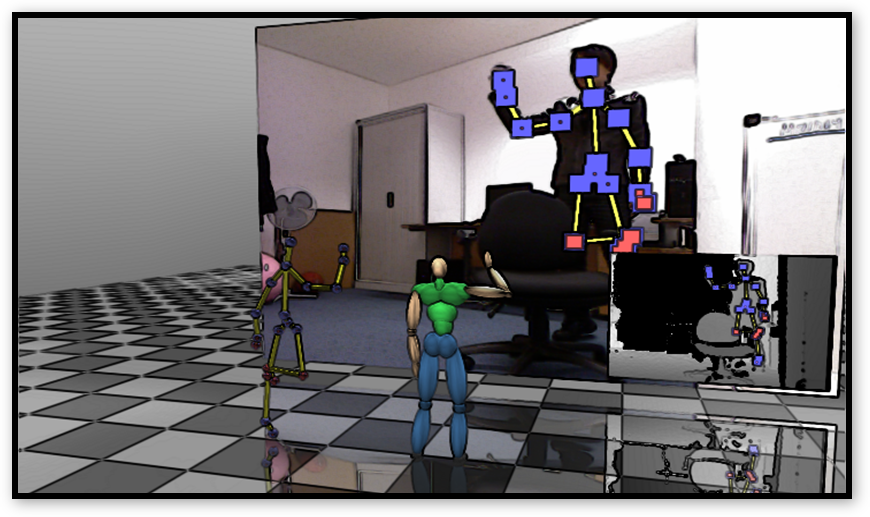
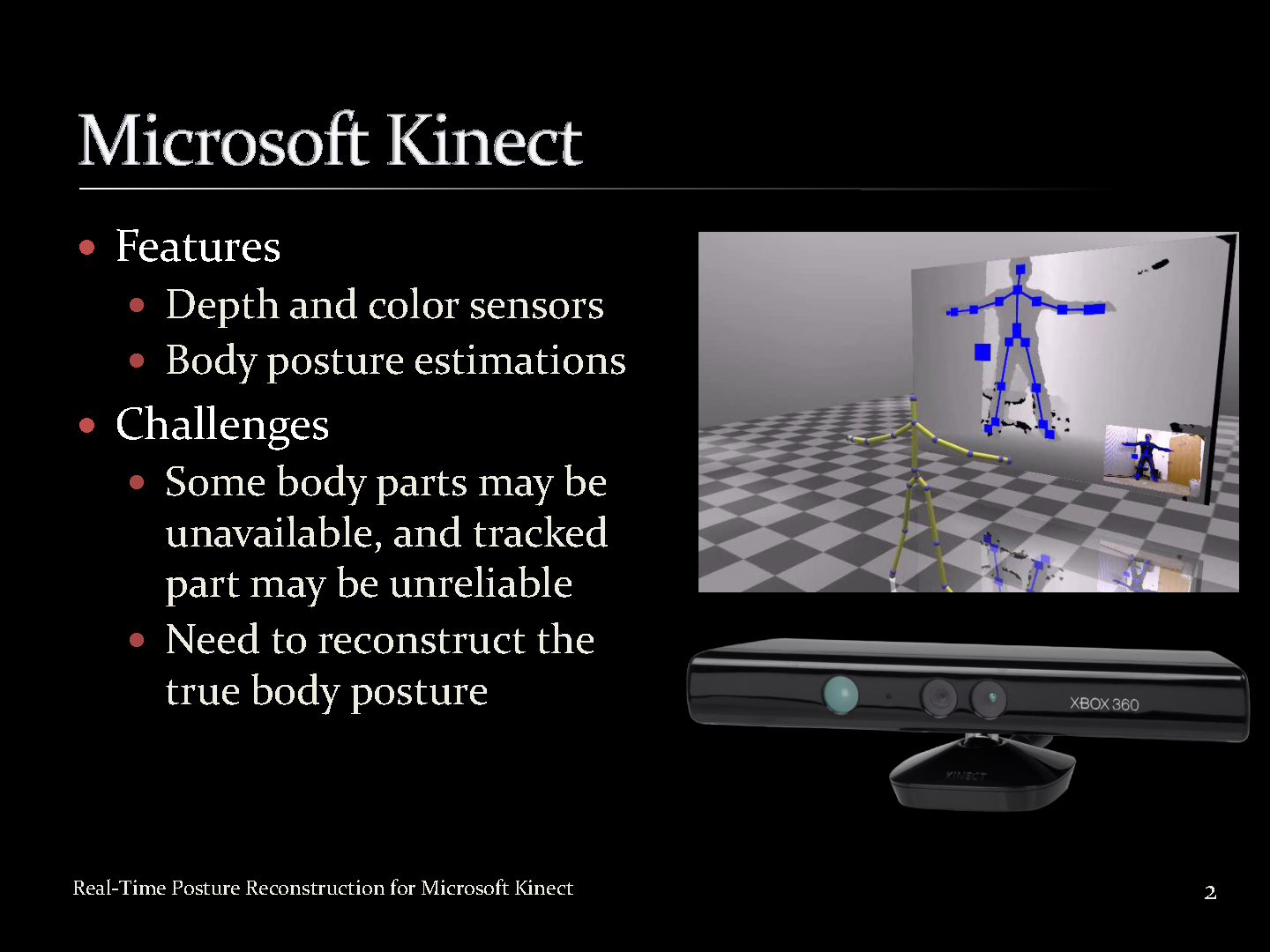
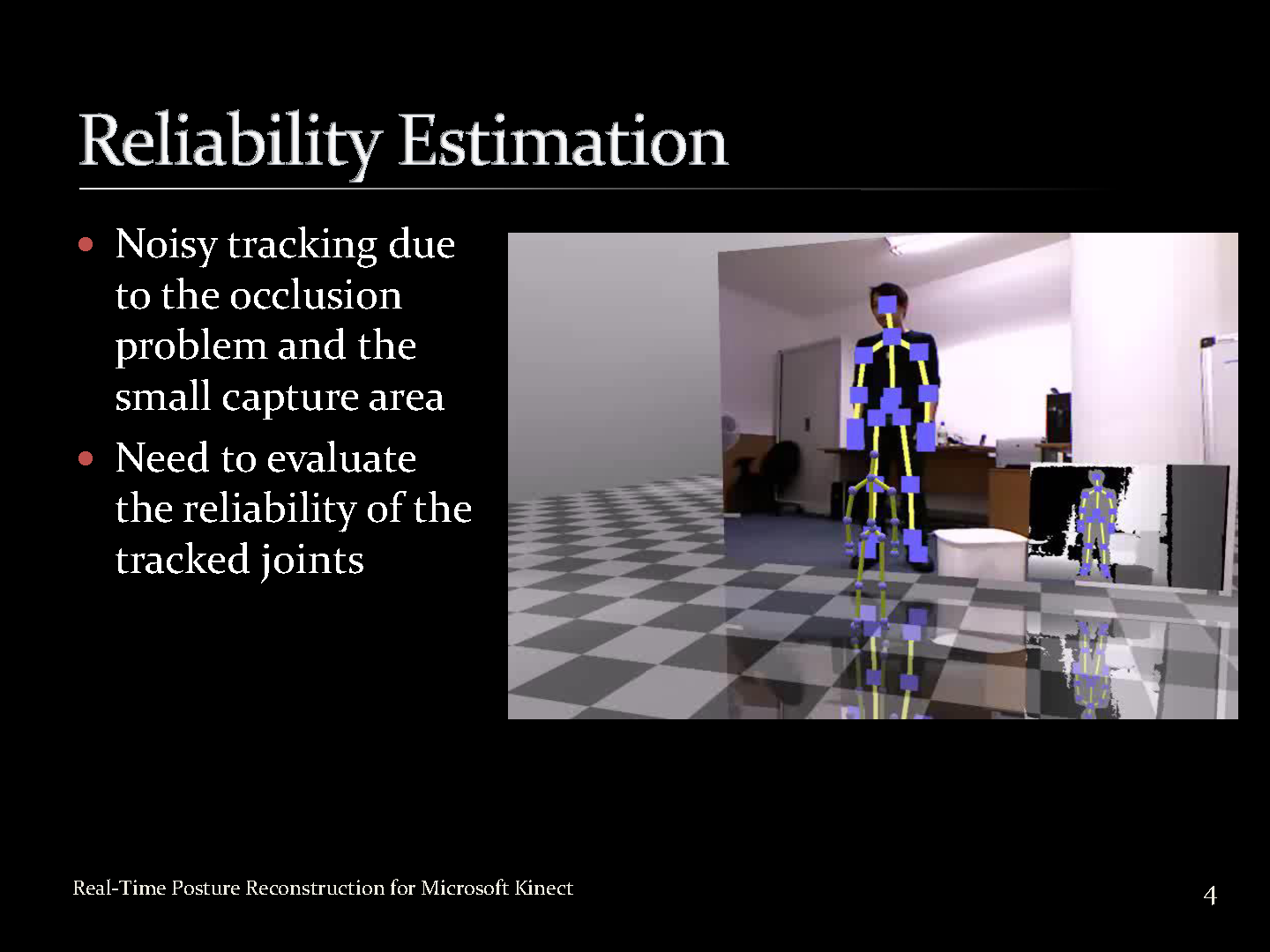
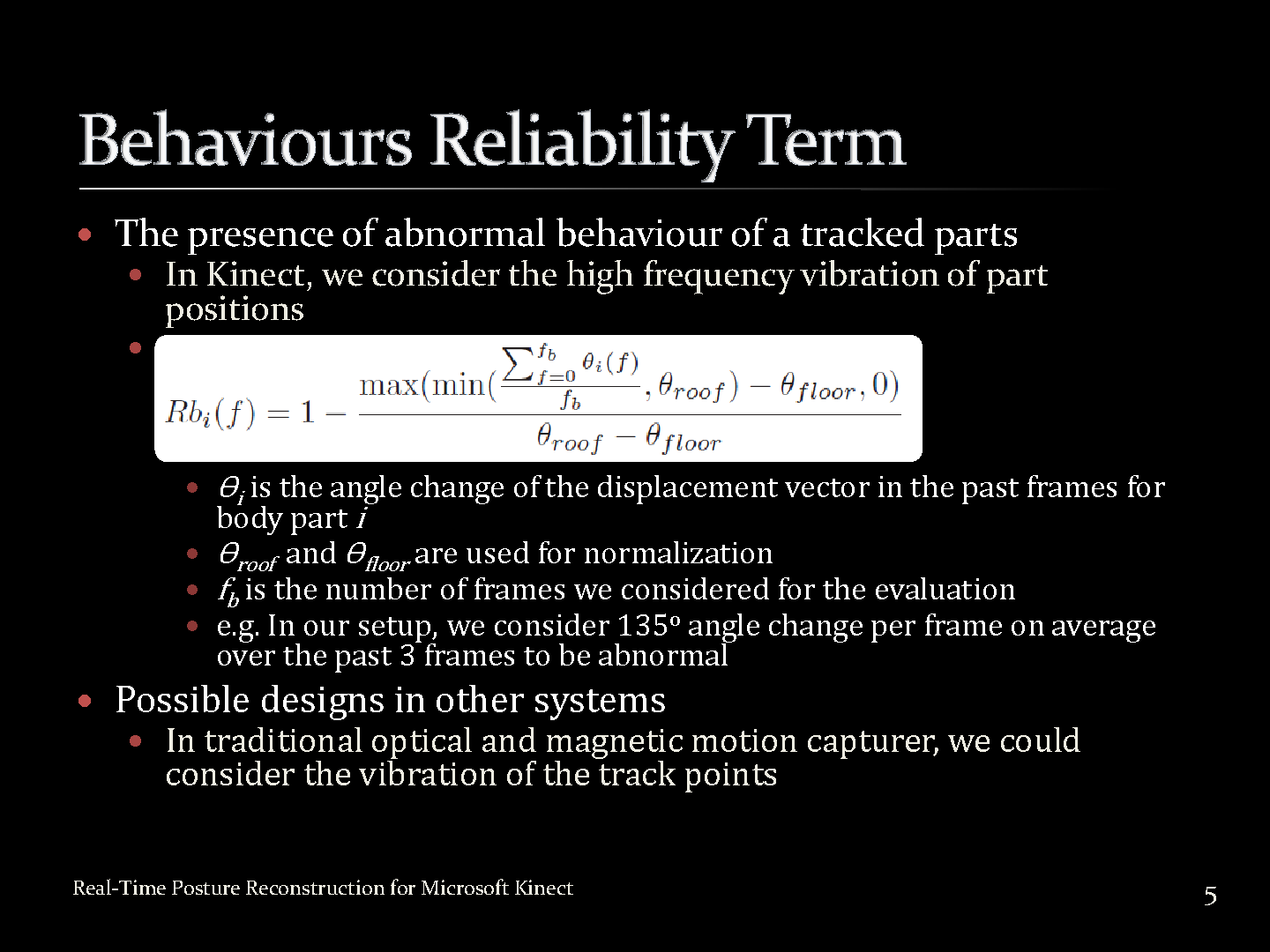
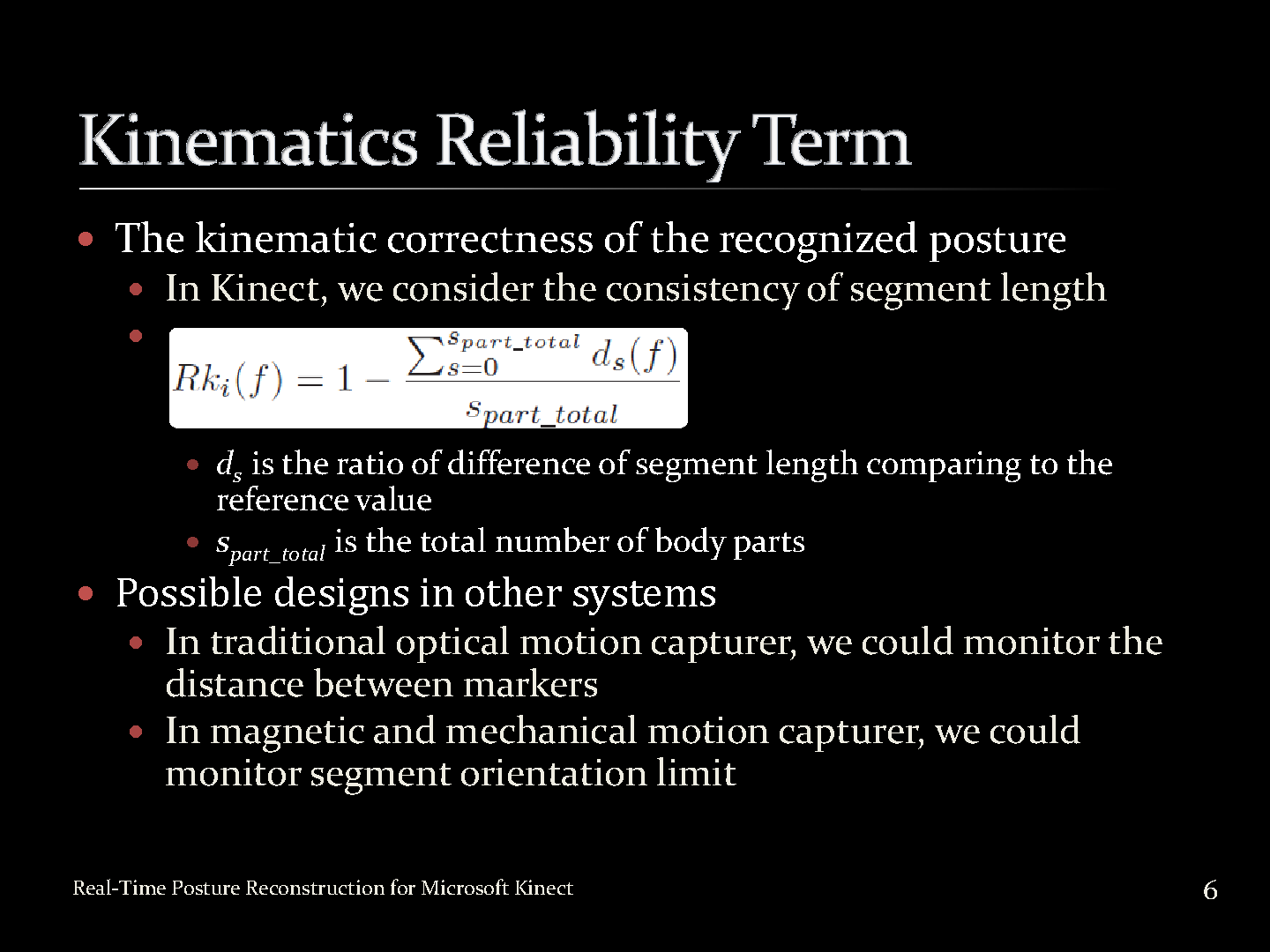
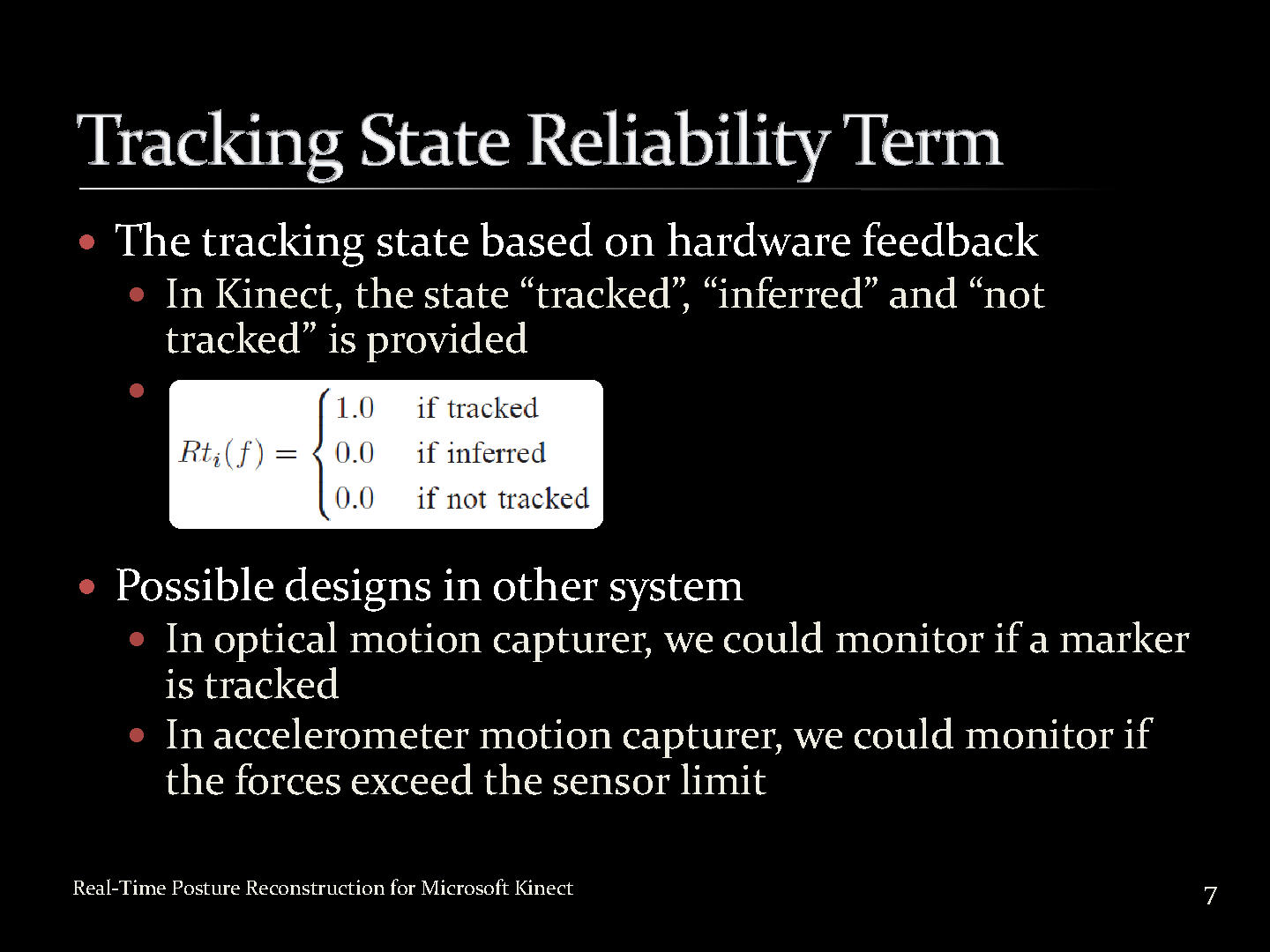
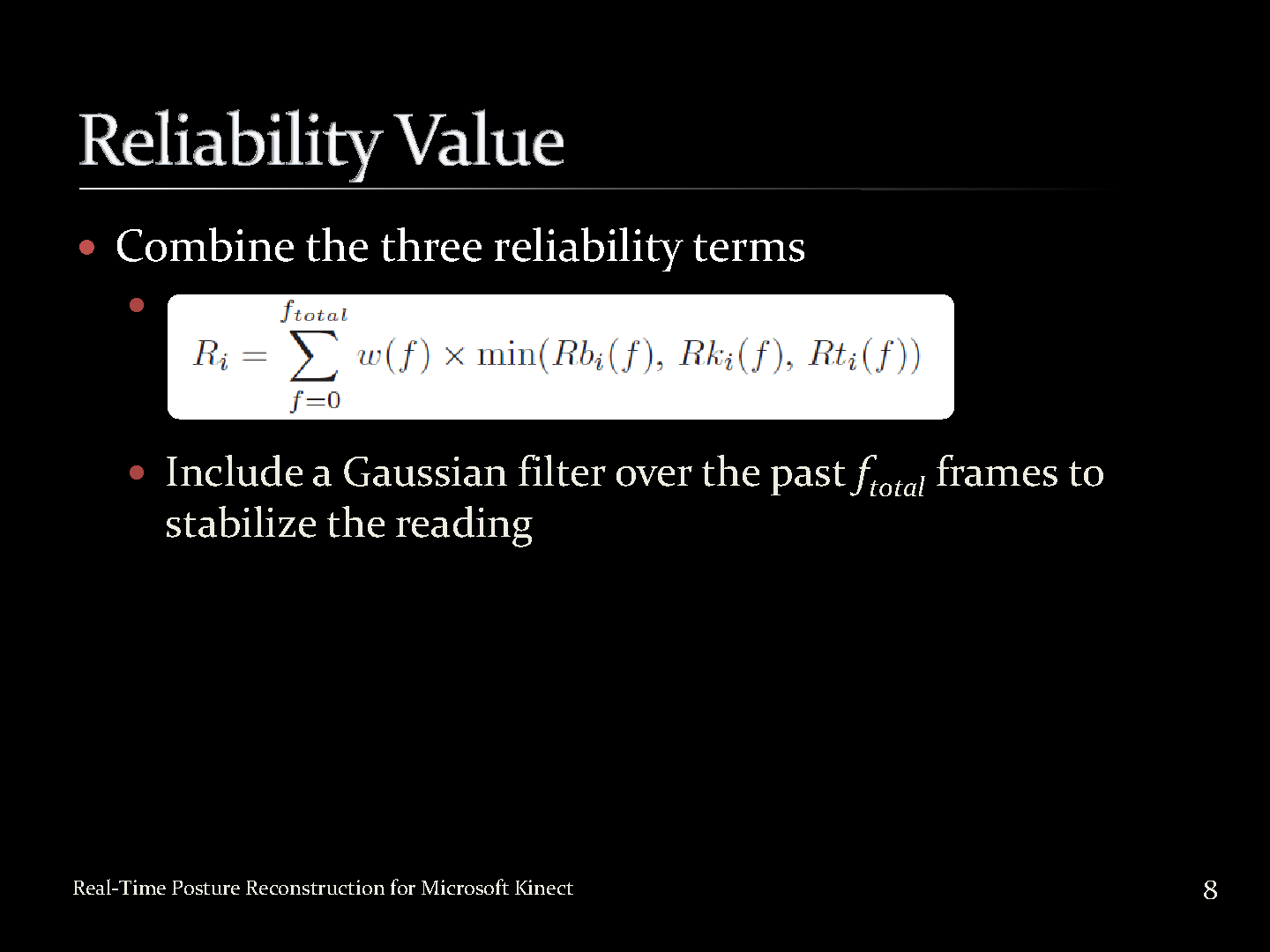
The recent advancement of motion recognition using Microsoft Kinect stimulates many new ideas in motion capture and virtual reality applications. Utilizing a pattern recognition algorithm, Kinect can determine the positions of different body parts from the user. However, due to the use of a single depth camera, recognition accuracy drops significantly when the parts are occluded. This hugely limits the usability of applications that involves interaction with external objects, such as sport training or exercising systems. The problem becomes more critical when Kinect incorrectly perceives the body parts. This is because applications have limited information about the recognition correctness, and using those parts to synthesize a body postures would result in serious visual artifacts. In this paper, we propose a new method to reconstruct valid movement from incomplete and noisy postures captured by Kinect. We first design a set of measurements that objectively evaluates the degree of reliability on each tracked body part. By incorporating the reliability estimation into a motion database query during run-time, we obtain a set of similar postures that are kinematically valid. These postures are used to construct a latent space, which is known as the natural posture space in our system, with local Principle Component Analysis (PCA). We finally apply frame-based optimization in the space to synthesize a new posture that closely resembles the true user posture while satisfying kinematic constraints. Experimental results show that our method can significantly improve the quality of the recognized posture under severely occluded environments, such as a person exercising with a basketball or moving in a small room.















YouTube
Cite This Research
Supporting Grants

Received from Northumbria University, UK, 2012-2013
Project Page