Serious Games with Human-Object Interactions using RGB-D Camera
Hubert P. H. Shum
Proceedings of the 2013 ACM International Conference on Motion in Games (MIG) Posters, 2013
Abstract
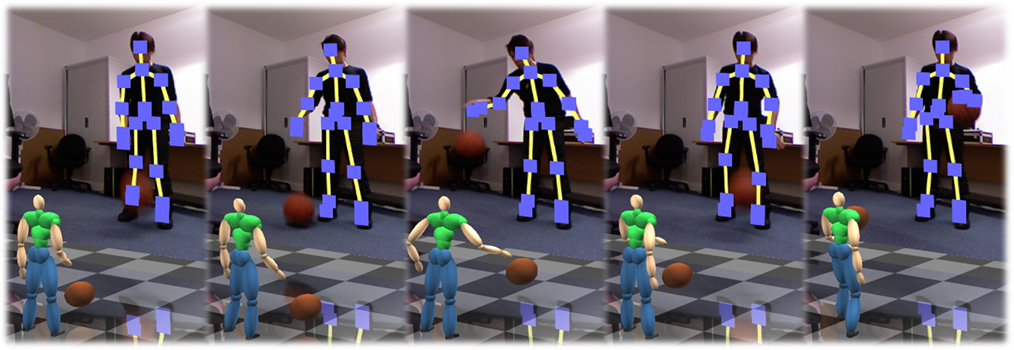
Commercial RGB-D cameras typically require a clear posture without occlusion. This hugely limits the usability of the device for serious applications that require manipulation of external objects. In this paper, we propose an integrated framework to track motion and object during human-object interactions. We implement a data-driven posture reconstruction algorithm to correct wrongly tracked body parts during occlusions, as well as a computer vision based object tracking algorithm using the depth image. We demonstrate preliminary results in which the system tracks a user playing with a basketball.








Cite This Research
Similar Research
Hubert P. H. Shum, Edmond S. L. Ho, Yang Jiang and Shu Takagi, "Real-Time Posture Reconstruction for Microsoft Kinect", IEEE Transactions on Cybernetics (TCyb), 2013
Liuyang Zhou, Zhiguang Liu, Howard Leung and Hubert P. H. Shum, "Posture Reconstruction Using Kinect with a Probabilistic Model", Proceedings of the 2014 ACM Symposium on Virtual Reality Software and Technology (VRST), 2014
Kevin Mackay, Hubert P. H. Shum and Taku Komura, "Environment Capturing with Microsoft Kinect", Proceedings of the 2012 International Conference on Software, Knowledge, Information Management and Applications (SKIMA), 2012
Zhiguang Liu, Liuyang Zhou, Howard Leung and Hubert P. H. Shum, "Kinect Posture Reconstruction Based on a Local Mixture of Gaussian Process Models", IEEE Transactions on Visualization and Computer Graphics (TVCG), 2016
Pierre Plantard, Hubert P. H. Shum and Franck Multon, "Filtered Pose Graph for Efficient Kinect Pose Reconstruction", Multimedia Tools and Applications (MTAP), 2017